



5.3.4 多级递阶智能控制系统的构造和运行步骤
本段将详细阐述多级递阶智能控制系统的构造和运行步骤如下(见图5.18):
图5.18 复杂的循环经济系统的设计步骤
(1)由工程师和专家参与,明确循环经济系统的总体要求和目标。
(2)分类并确定设计参数(控制变量、干扰变量和输出变量)及其范围(见图5.19),根据范围定义一个初始探索空间。
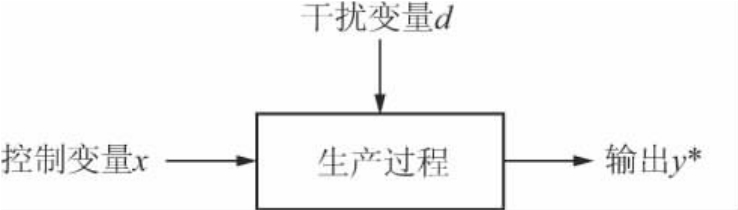
图5.19 参数种类
(3)建立动态投入/产出反馈控制模型式(5.34)
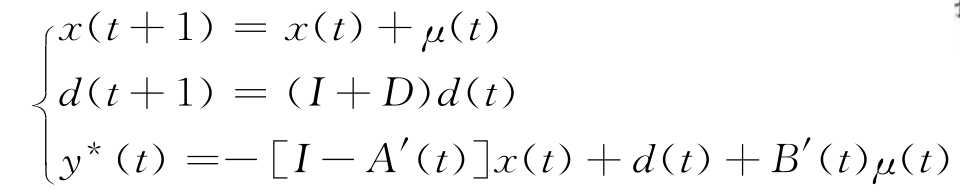
(5.34)
注:式(5.34)中变量的意义与第二节的相同。
(4)由专家系统根据实际情况确定系统的总体目标,建立相应的目标函数。
(5)由智能适应器根据实际情况建立专家系统和仿真程序(如人工神经网络等),预测每年社会需求量的变化率ai(i=1,2,…,n);目标函数的期望值E=(e1,e2,…,en)′;年总流量的改变量μ(t)的上、下限约束;各个过程的能耗向量P(t)=[p1(t),p2(t),p3(t)]′;过程流系数矩阵A(t);生态状态投资系数阵B(t)等系统参数。
(6)通过实验分析处理器结合专家系统,分析实验结果,明确重要的控制因子,除去不重要的因子。如果有必要,设计和构造更准确的仿真程序。将分析结果反馈到智能适应器,在图5.19的C、D、E之间形成迭代,直到产生准确的模型参数。
(7)在智能协调器中,协调器和各个决策单元建立各自的非线性多目标动态优化决策模型,然后求解出各自的满足控制因子约束条件的最优控制值和性能指标值,反馈给组织器进行修正,最终由专家系统和决策者确定满意解集。
(8)由专家系统在满意解集中选择符合实际情况的最优控制,传给每个子系统的智能控制器(包括系统控制目标、动态调节器等),控制各个子系统的运行。
(9)输出一个高层次的、开放的、稳定的设计说明书。
在设计过程中,动态投入/产出反馈控制模型、专家系统、智能控制技术、仿真程序和实验分析综合在非线性多目标智能协调系统的框架中,探索设计空间,搜寻稳定区域,形成一个开放的、稳定的设计,充分体现了将循环经济系统设计成一个开放的工程系统的指导思想,并使得这个设计系统具有自适应、自组织、自学习和强壮性的特点。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











