



6.3 导线测量的内业工作
导线测量的内业计算,即在导线测量外业工作完成后,合理地进行各种误差的计算和调整,计算出各导线点坐标的工作。
在进行导线内业计算之前,一是要全面检查外业观测数据有无遗漏,记录、计算是否正确,成果是否符合精度要求。当发现记录、计算有错时,不要改动原始数据,要认真反复校核。二是要根据已知数据和观测结果绘制外业成果注记图。见图6.11。当确定外业成果符合要求后,才进行内业的计算。
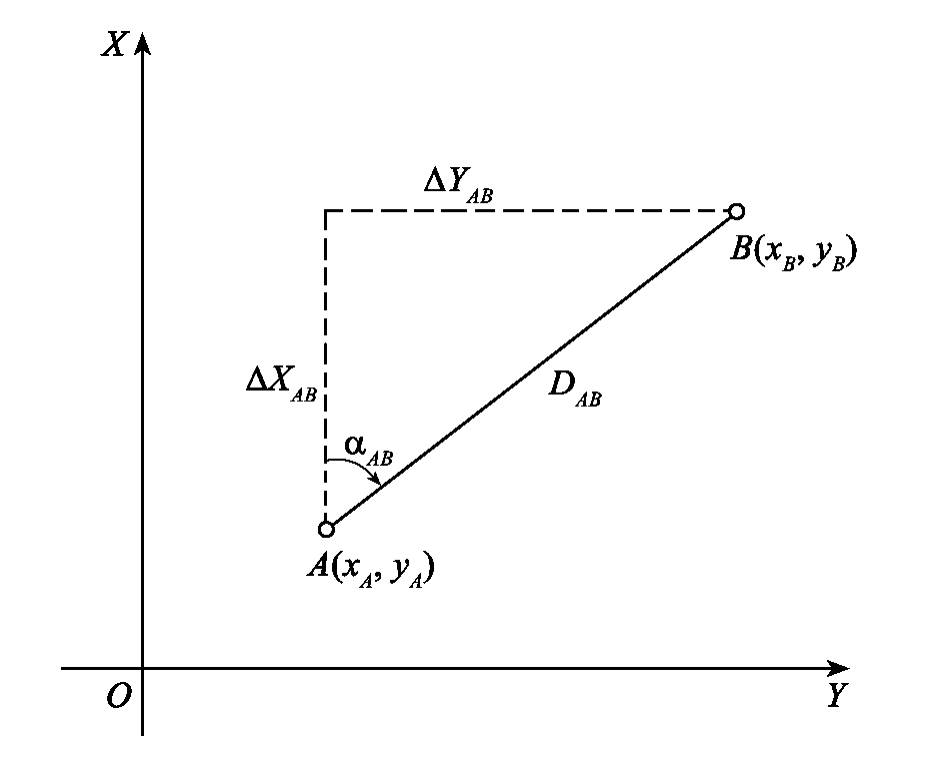
图6.11 坐标计算图示
6.3.1 测量坐标正反算
1.坐标正算
(1)定义:设已知点A的坐标为(xA、yA),测得AB之间的距离D及方位角αAB,推求待定点B的坐标(xB,yB)。
(2)公式:如图6.11所示,公式列于式(6.2)

2.坐标反算
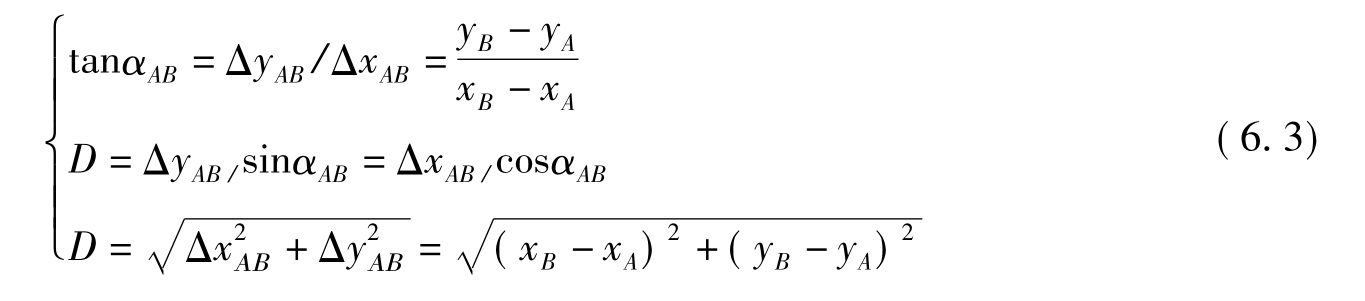
(1)定义:已知A、B两点的坐标(xA,yA),(xB,yB),计算两点间的距离D及方位角αAB的过程。
(2)公式:如图6.11所示,列公式如下:
6.3.2 闭合导线的内业计算
1.角度闭合差的计算和调整
(1)角度闭合差fβ的计算:
内角和观测值∑β测与理论值∑β理之差fβ称为闭合导线角度闭合差;
![]()
(2)计算角度闭合差允许值fβ允:按导线转折角观测和限差表的规定计算。
(3)判断精度:当fβ≤fβ允时,满足精度要求,超过则重测。
(4)计算角度改正数:闭合差按相反符号平均分配到各角上;当fβ不能整除时,余数分在短边上。
2.导线边方位角的计算
可根据第一条边的方位角和调整后的内角(左角),推算其他各边的方位角,其公式为:
![]()
式中,β左为改正后的左角。
当采用上式算得的α值超过360°时,应减去360°。由最后一边的方位角推算而得第一边的方位角,其值应等于它的起始值,如不等,表明计算有错误。
3.坐标增量计算及坐标增量闭合差的调整
(1)坐标增量的计算:
按坐标正算公式计算各边的坐标增量,其公式如下:
![]()
计算位数取到cm。
(2)坐标增量闭合差的计算:

式中,fx为纵坐标增量闭合差;
fy为横坐标增量闭合差。
(3)导线全长闭合差的计算:
![]()
(4)导线相对闭合差:
![]()
在通常情况下,图根导线的K值不应超过1/2000,困难地区也不应超过1/1000。
(5)计算坐标增量改正值:

δxi、δyi为第i条边纵、横坐标增量改正值;Di为第i条边的边长。
4.计算导线点的坐标
根据起点的已知坐标及调整之后的坐标增量,逐一推算。算完最后一点,还要再推算起点的坐标,推算得出的坐标应等于已知坐标。
5.闭合导线的内业计算算例
表6.6为一闭合导线计算算例,外业观测数据均标注在示意图中。
闭合导线坐标推算时,从已知点A开始,推算出B、C、D点的坐标,最后推算回到A点,应与原来A点坐标相同,作为推算坐标的检核。
6.3.3 附合导线的内业计算
1.附合导线的内业计算
如图6.12所示为一附合导线,它的起点1和终点3分别与高一级的控制点A、B和C、D连接,后者的坐标为已知,可按坐标反算公式计算起始边和终了边的方位角,即:

附合导线与闭合导线的计算步骤基本相同,但几何条件不同,角度闭合差和坐标增量闭合差的计算就有所不同。
(1)角度闭合差的计算:

根据两端方向已知的特点,可由导线起始边的方位角αAB和左角βi,推算得终了边的方位角 ,即:
,即:
![]()
由上式计算得到的方位角应减去若干个360°,使其角值在0~360°之间。
附合导线的角度闭合差为:
![]()
(2)坐标增量闭合差的计算:

附合导线各导线点坐标计算的其他内容,同闭合导线一样。
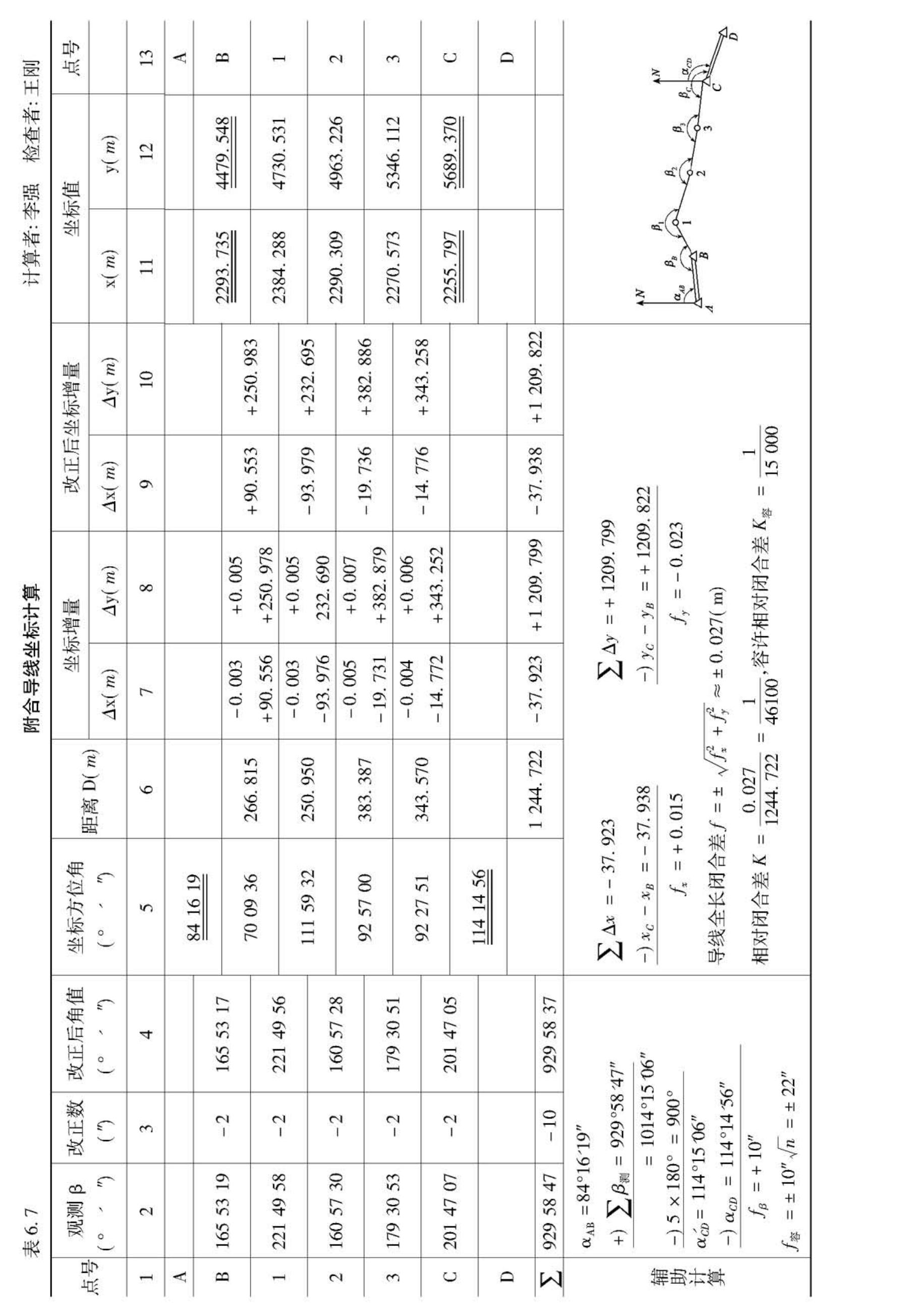
2.附合导线内业计算算例
如图6.12所示为一附合导线算例,外业观测数据均标注在图中,内业计算见表6.7。
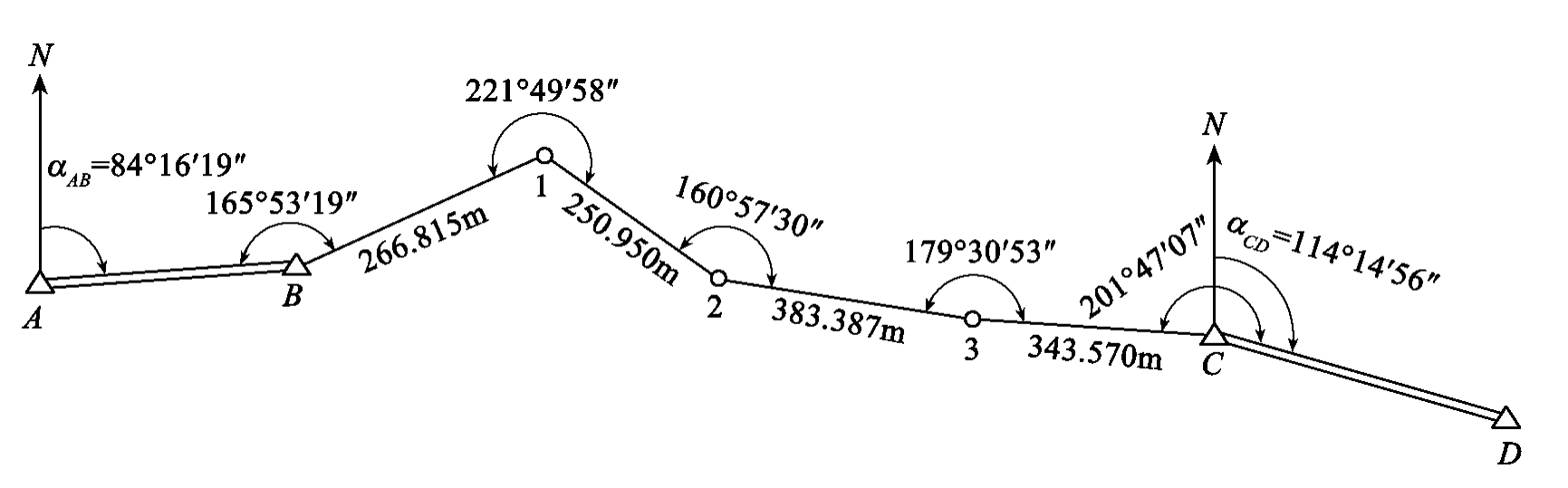
图6.12 附合导线算例
6.3.4 支导线计算
支导线中没有检核条件,因此没有闭合差产生,导线转折角和计算的坐标增量均不需要进行改正。支导线的计算步骤为:
(1)根据观测的转折角推算各边的坐标方位角。
(2)根据各边坐标方位角和边长计算坐标增量。
(3)根据各边的坐标增量推算各点的坐标。
6.3.5 测角交会定点
小区域平面控制网的布设,一般采用导线测量和小三角测量的方法。当测区内已有控制点的数量不能满足测图或施工放样需要时,也经常采用交会法测量来加密控制点。测角交会法布设的形式有前方交会法、侧方交会法和后方交会法。
1.前方交会法
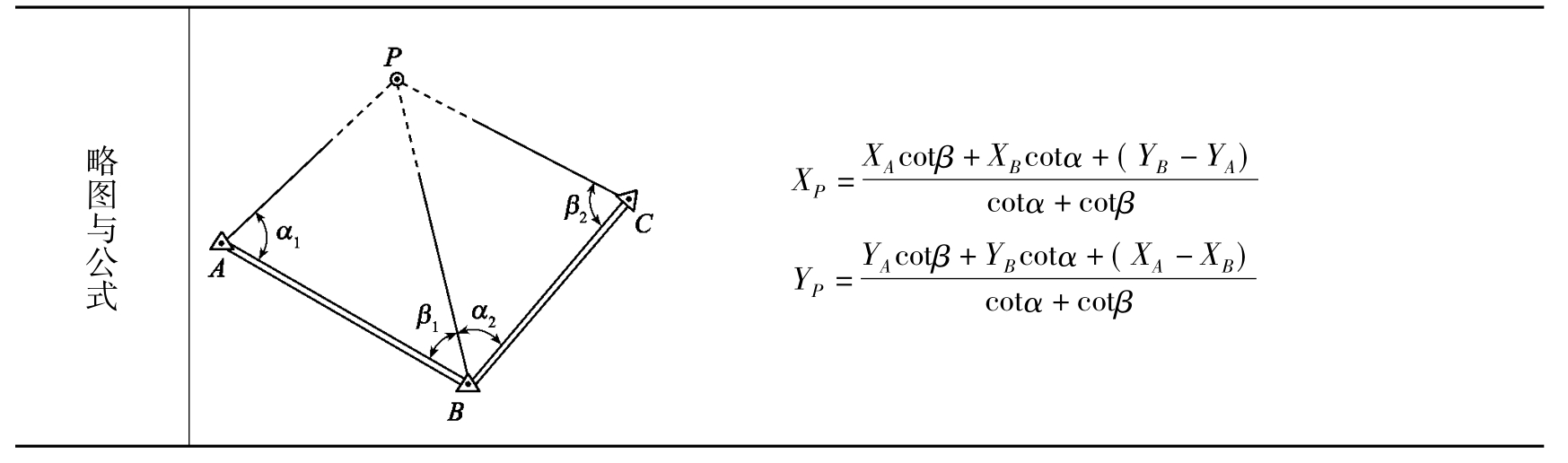
前方交会法如图6.13所示,AB为两个相邻的已知点,待求点P,通过观测α和β角,计算P点坐标,称为前方交会。为了进行检核和提高测量P点的精度,在实际工作中,采用三个已知点进行交会,由两个三角形分别计算待求点(P)的坐标,符合要求,取两组坐标的平均值作为P点的坐标。
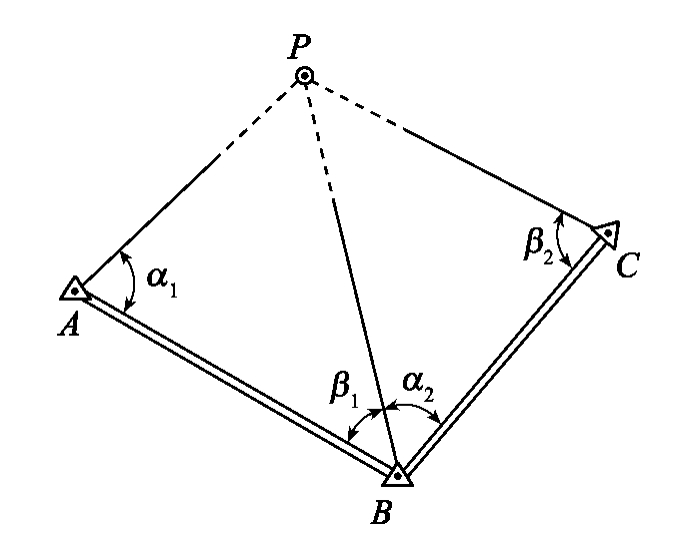
图6.13 前方交会
1)已知点坐标反算
根据两个已知点的坐标,计算两点间的边长c及坐标方位角αAB,得

2)待定边边长和坐标方位角计算
按正弦定律计算已知点至待定点的边长a,b:

按下式计算待定边的坐标方位角:
![]()
3)待定点坐标计算
根据已算得的待定边的边长和坐标方位角,按坐标正算法,分别从已知点A,B计算至待定P的坐标增量:

然后分别从A,B点计算待定点P的坐标,两次算得的坐标可以作为检核:
![]()
![]()
4)直接计算待定点坐标的公式
以上公式经过化算,可以得到直接计算待定点P的坐标的公式。推导如下:
由于ΔXAP=XP-XA,αAP=αAB-α,因此,(6.19)式可以写成:
![]()

按正弦定律 =
= 计算,将等号左边已知数据XA、XB移到右边,可推算出直接计算代定点坐标的余切公式:
计算,将等号左边已知数据XA、XB移到右边,可推算出直接计算代定点坐标的余切公式:
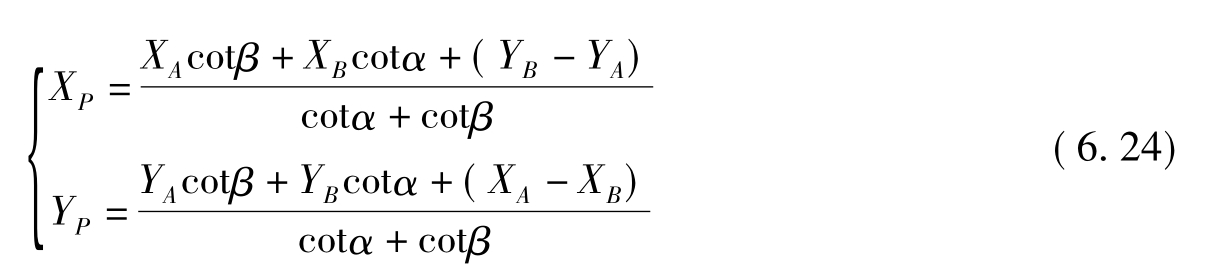
如果将cotα=1/tanα,cotβ=1/tanβ代入式(6.24)进行计算,则得到前方交会直接计算待定点坐标的正切公式:

由于可以直接用计数器进行正切函数计算,因此使用正切公式比使用余切公式更方便。前方交会的算例见表6.8。
表6.8 前方交会计算表
续表
2.侧方交会
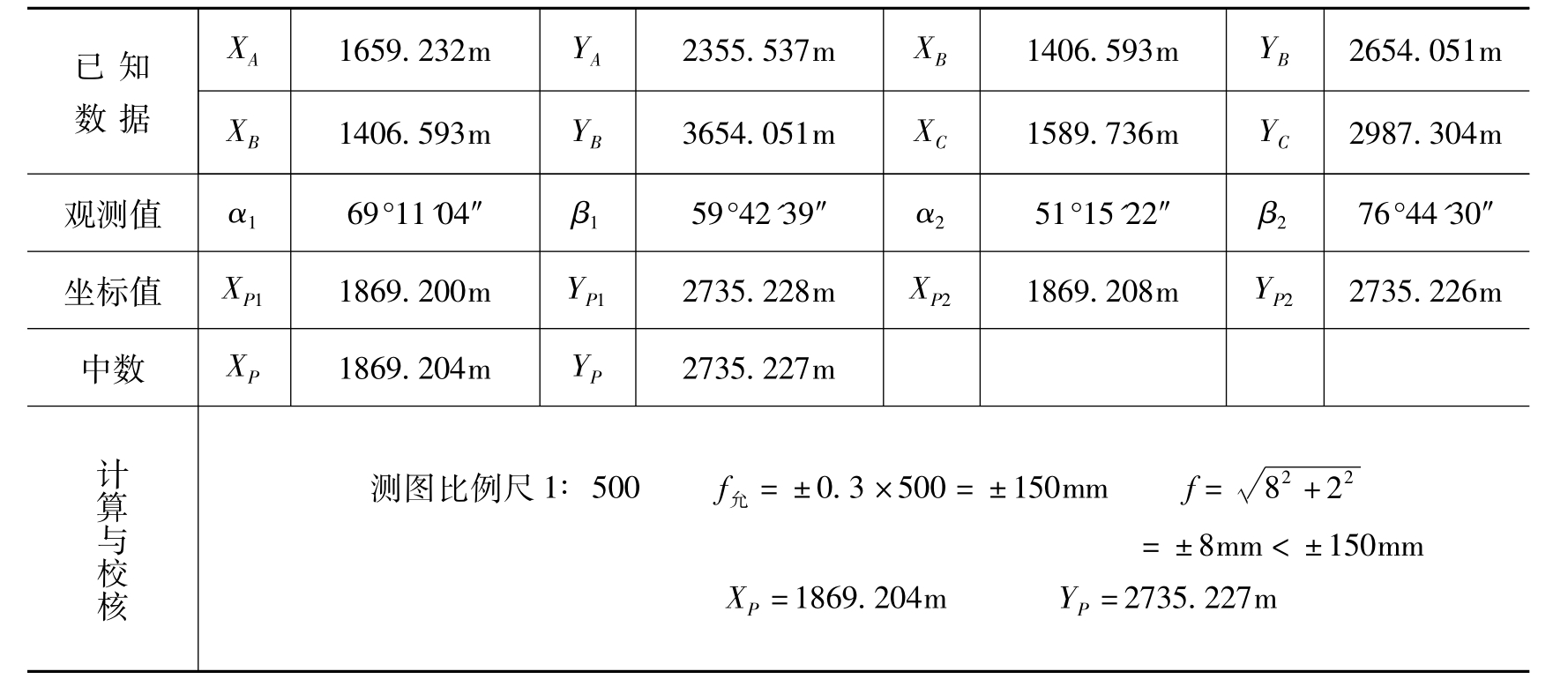
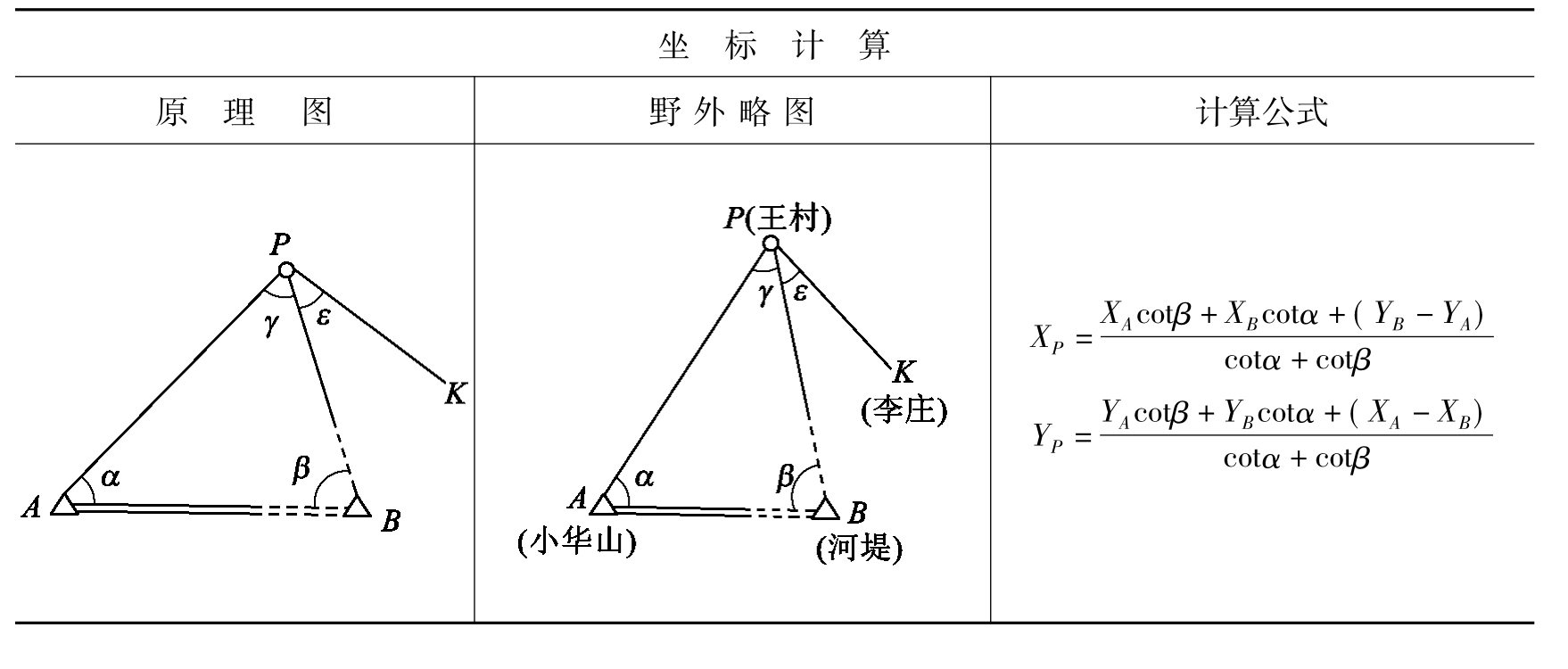
如图6.14所示是侧方交会测量的布设形式,侧方交会的计算先解出控制点A上的角α,由图可知,α=180°-(β-γ),其交会点P的坐标值可根据三角形ABP用余切公式进行计算,计算格式和前方交会相似,见算例表6.9。
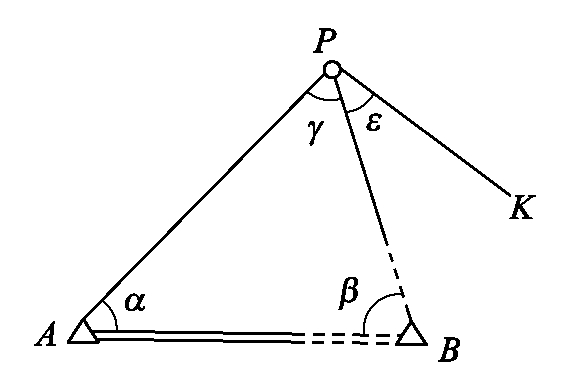
图6.14 侧方交会
表6.9 侧方交会算例
续表
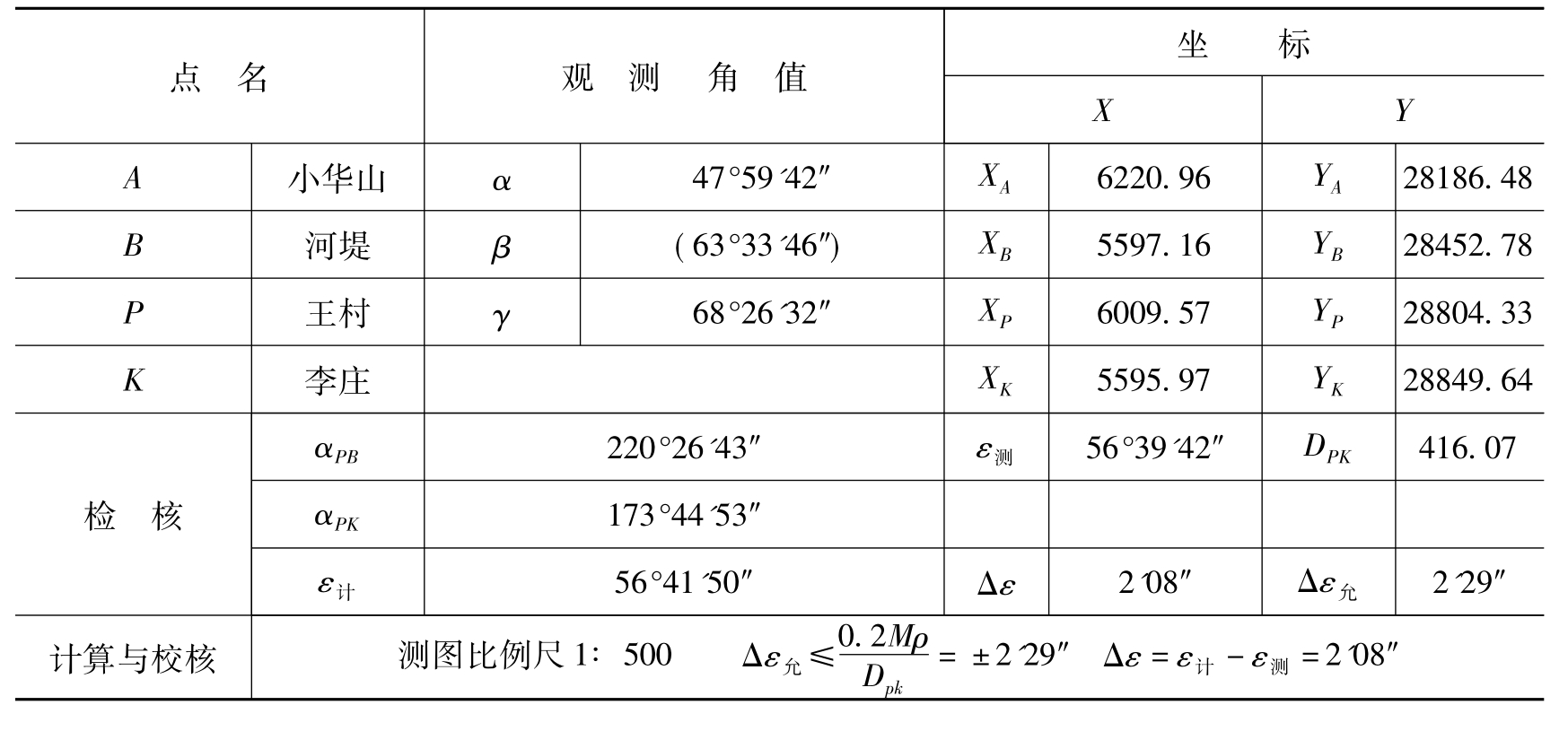
为了检查侧方交会点点位的精度,应根据算得的P点坐标和B、K两点的已知坐标反算出方位角αPB、αPK及距离DPK。∠BPK的计算值ε算=αPB-αPK,与实测的角值ε测,有一个角度差Δε,即
![]()
在1∶5000及1∶10000比例尺测图中,∣Δε∣应小于或等于0.15Mρ/DPC;在1∶5000~1∶2000比例尺测图中,∣Δε∣则应小于或等于0.20Mρ/DPK(M为测图比例尺的分母)。
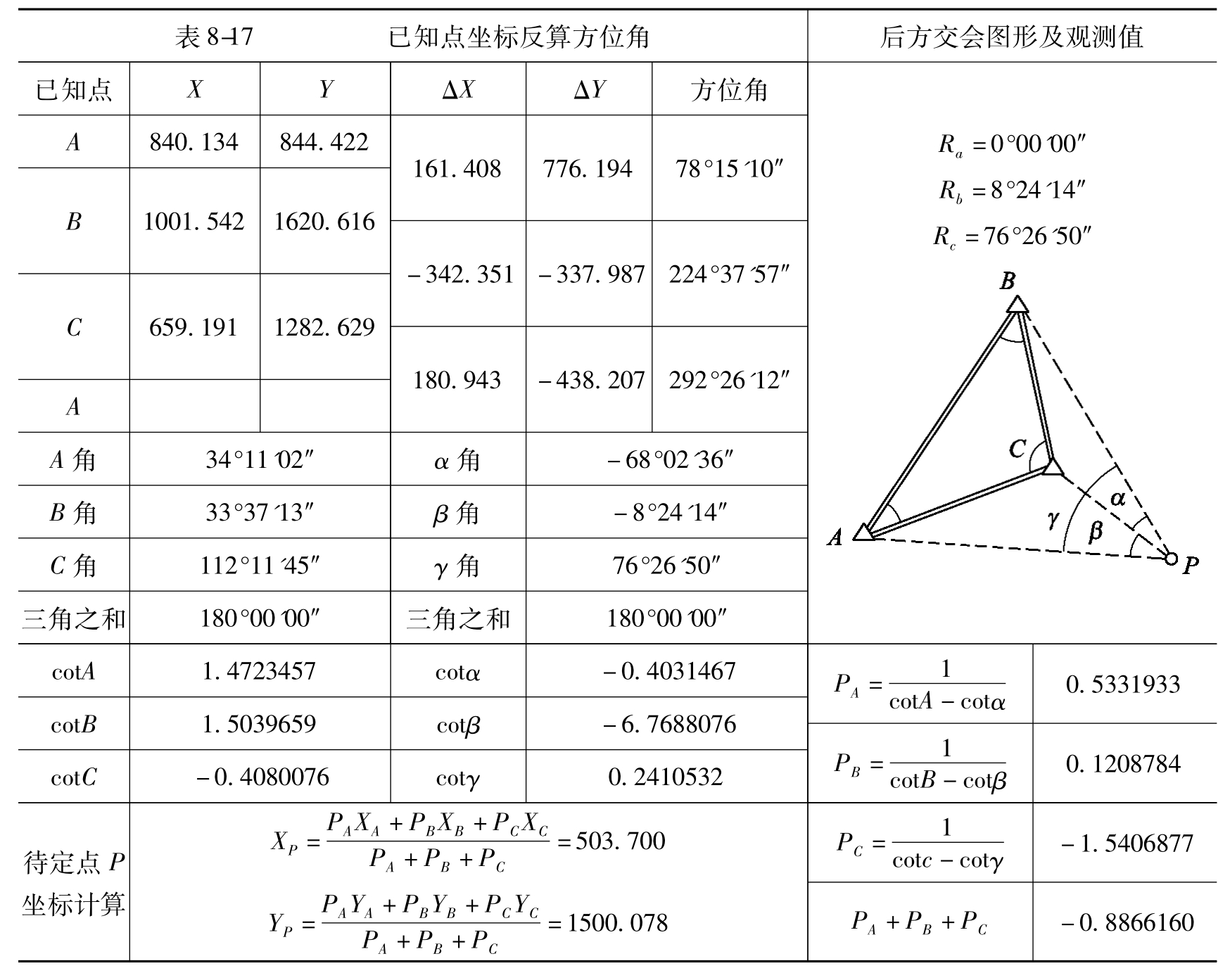
3.后方交会
从一待定点P向三个已知点A、B、C观测水平角方向值Ra,Rb,Rc,计算P点的坐标的方法,称为后方交会,如图6.15所示。已知点A,B,C按顺时针排列,待定点P可以在已知点所组成的△ABC之内,也可以在其外。但是,当A,B,C,P处于四点共圆的位置时,用后方交会这种方法就无法确定P点的位置(坐标)。因此,四点共圆称为危险圆。

图6.15 后方交会布设形式
4.后方交会坐标计算的重心公式
设已知点A、B、C所构成的已知三角形的三个内角即命名为A、B、C角,如图6.15所示,在P点对A、B、C三点观测的水平方向值Ra,Rb,Rc也构成三个水平角为α,β,γ,并规定:
则待定点P的坐标值为:
上式中,XA,YA,XB,YB,XC,YC为三个已知点的坐标。如果把PA,PB,PC看做三个已知点A,B,C的权,则待定点P的坐标值是三个已知点坐标的加权平均值。见算例表6.10。
表6.10 后方交会算例
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










