



1.2 传感器的特性与指标
1.2.1 传感器的静态特性
静态特性表示传感器在被测输入量各个值处于稳定状态时的输出输入关系。研究静态特性主要应考虑其非线性与随机变化等因素。
1.线性度
线性度又称非线性,是表征传感器输出-输入校准曲线与所选定的拟合直线(作为工作直线)之间的吻合(或偏离)程度的指标。通常用相对误差来表示线性度或非线性误差,即

式中,ΔLmax——输出平均值与拟合直线间的最大偏差;
yF.S——理论满量程输出值。
显然,选定的拟合直线不同,计算所得的线性度数值也就不同。选择拟合直线应保证获得尽量小的非线性误差,并考虑使用与计算方便。下面介绍几种目前常用的拟合方法。
(1)理论直线法 如图1-4(a)所示,以传感器的理论特性线作为拟合直线,它与实际测试值无关。优点是简单、方便,但通常ΔLmax很大。
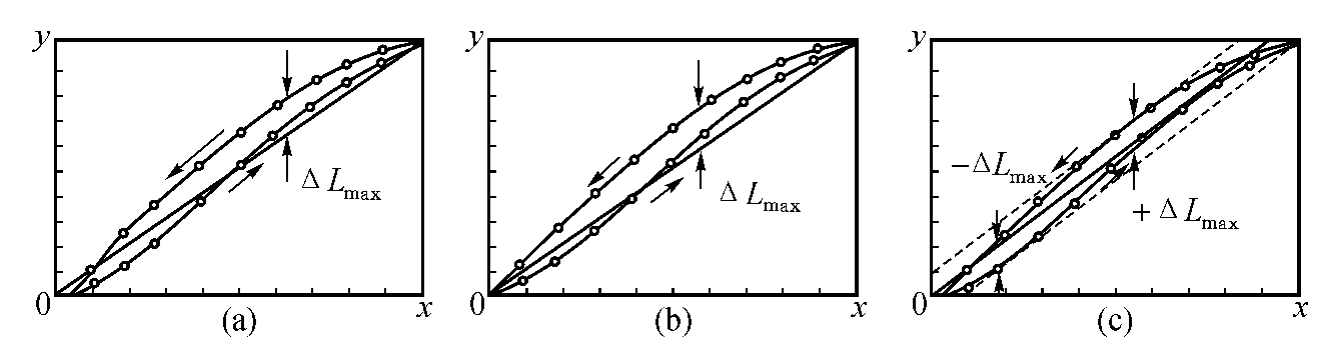
图1-4 几种不同的拟合方法
(a)理论直线法;(b)端点直线法;(c)“最佳直线”法
(2)端点直线法 如图1-4(b)所示,以传感器校准曲线两端点间的连线作为拟合直线。其方程式为
y=b+kx (1-6)
式中,b和k——分别为截距和斜率。
这种方法也很简便,但ΔLmax也很大。
(3)“最佳直线”法 这种方法以“最佳直线”作为拟合直线,该直线能保证传感器正反行程校准曲线对它的正、负偏差相等并且最小,如图1-4(c)所示。由此所得的线性度称为“独立线性度”。显然,这种方法的拟合精度最高。通常情况下,“最佳直线”只能用图解法或通过计算机解算来获得。
当校准曲线(或平均校准曲线)为单调曲线,且测量上、下限处之正、反行程校准数据的算术平均值相等时,“最佳直线”可采用端点连线平移来获得。有时称该法为端点平行线法。
(4)最小二乘法 这种方法按最小二乘原理求取拟合直线,该直线能保证传感器校准数据的残差平方和最小。如用式(1-6)表示最小二乘法拟合直线,式中的系数b和k可根据下述分析求得。
设实际校准测试点有n个,则第i个校准数据yi与拟合直线上相应值之间的残差为

按最小二乘法原理,应 分别对k和b求一阶偏导数并令其等于
分别对k和b求一阶偏导数并令其等于
零,即可求得k和b:
![]()

式中,∑xi=x1+x2+…+xn;
∑yi=y1+y2+…+yn;
∑xiyi=x1y2+x2y2+…+xnyn;

最小二乘法的拟合精度很高,但校准曲线相对拟合直线的最大偏差绝对值并不一定最小,最大正、负偏差的绝对值也不一定相等。
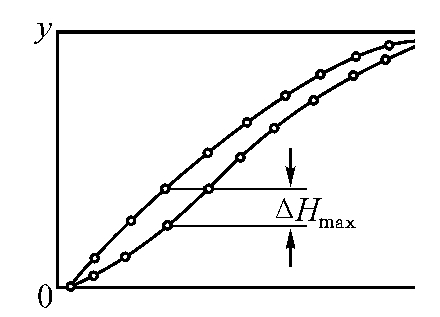
图1-5 回差(滞后)特性
2.回差(滞后)
回差是反映传感器在正(输入量增大)反(输入量减小)行程过程中输出-输入曲线的不重合程度的指标。通常用正反行程输出的最大差值ΔHmax计算,并以相对值表示(见图1-5):

3.重复性
重复性是衡量传感器在同一工作条件下,输入量按同一方向作全量程连续多次变动时,所得特性曲线间一致程度的指标。各条特性曲线越靠近,重复性越好。
重复性误差反映的是校准数据的离散程度,属随机误差,因此应根据标准偏差计算,即

式中,σmax——各校准点正行程与反行程输出值的标准偏差中之最大值;
a——置信系数,通常取2或3。a=2时,置信概率为95.4%;a=3时,置信概率为99.73%。
计算标准偏差σ的方法常用的有:
(1)贝塞尔公式法 计算公式为
式中,yi——某校准点之输出值;
-yi——输出值的算术平均值;
n——测量次数。
这种方法精度较高,但计算较繁。
(2)极差法 所谓极差是指某一校准点校准数据的最大值与最小值之差。计算标准偏差的公式为
式中,Wn——极差;
dn——极差系数,其值与测量次数n有关,可由表1-1查得。
表1-1 极差系数

这种方法计算比较简便,常用于n≤10的场合。
在采用以上两种方法时,若有m个校准点,正反行程共可求得2m个σ,一般应取其中最大者σmax计算重复性误差。
按上述方法计算所得重复性误差不仅反映了某一传感器输出的一致程度,而且还代表了在一定置信概率下的随机误差极限值。
4.灵敏度
灵敏度是传感器输出量增量与被测输入量增量之比。线性传感器的灵敏度就是拟合直线的斜率,即
K=Δ/yΔx
非线性传感器的灵敏度不是常数,应以dy/dx表示。
实用上由于外源传感器的输出量与供给传感器的电源电压有关,其灵敏度的表达往往需要包含电源电压的因素。例如某位移传感器,当电源电压为1V时,每1mm位移变化引起输出电压变化100mV,其灵敏度可表示为100(mV/mm·V)。
5.分辨力
分辨力是传感器在规定测量范围内所能检测出的被测输入量的最小变化量。有时用该值相对满量程输入值之百分数表示,则称为分辨率。
6.阈值
阈值是能使传感器输出端产生可测变化量的最小被测输入量值,即零位附近的分辨力。有的传感器在零位附近有严重的非线性,形成所谓“死区”,则将死区的大小作为阈值;更多情况下阈值主要取决于传感器的噪声大小,因而有的传感器只给出噪声电平。
7.稳定性
又称长期稳定性,即传感器在相当长时间内仍保持其性能的能力。稳定性一般以室温条件下经过一规定的时间间隔后,传感器的输出与起始标定时的输出之间的差异来表示,有时也用标定的有效期来表示。
8.漂移
漂移指在一定时间间隔内,传感器输出量存在着与被测输入量无关的、不需要的变化。漂移包括零点漂移与灵敏度漂移。
零点漂移或灵敏度漂移又可分为时间漂移(时漂)和温度漂移(温漂)。时漂是指在规定条件下,零点或灵敏度随时间的缓慢变化;温漂为周围温度变化引起的零点或灵敏度漂移。
9.静态误差(精度)
这是评价传感器静态性能的综合性指标,指传感器在满量程内任一点输出值相对其理论值的可能偏离(逼近)程度。它表示采用该传感器进行静态测量时所得数值的不确定度。
静态误差的计算方法国内外尚不统一,目前常用的方法有:
(1)将非线性、回差、重复性误差按几何法或代数法综合,即

(2)将全部标准数据相对拟合直线的残差看成随机分布,求出标准偏差σ,然后取2σ或3σ作为静态误差,这时

式中,Δyi——各测试点的残差;
p——所有测试循环中总的测试点数。例如正反行程共有m个测试点,每测试点重复测量n次,则p=m·n。
仍用相对误差表示静态误差,则有

由于非线性、回差可反映为系统误差,但它们的最大值并不一定出现在同一位置,而重复性则反映为随机误差,故按式(1-13)计算所得的静态误差偏大,而按式(1-12)及式(1-14)计算则偏小。
(3)将系统误差与随机误差分开考虑。该法从原理上讲比较合理,计算公式为

式中,(Δy)max——校准曲线相对拟合直线的最大偏差,即系统误差的极限值;
σ——按极差法计算所得的标准偏差;
a——根据所需置信概率确定的置信系数。美国国家标准局推荐该法,并规定按t分布确定a,当置信概率为90%、重复试验5个循环(即n=5)时,a=2.131 85。
若传感器是由若干个环节组成的开环系统,设第j个环节的灵敏度为Kj,第i个环节的绝对误差和相对误差分别为Δyi和ei,则传感器的总绝对误差Δyc和相对误差ec分别为

可见,为了减小传感器的总误差,应该设法减小各组成环节的误差。
1.2.2 传感器的动态特性
动态特性是反映传感器对于随时间变化的输入量的响应特性。用传感器测试动态量时,希望它的输出量随时间变化的关系与输入量随时间变化的关系尽可能一致;但实际并不尽然,因此需要研究它的动态特性——分析其动态误差。它包括两部分:(1)输出量达到稳定状态以后与理想输出量之间的差别;(2)当输入量发生跃变时,输出量由一个稳态到另一个稳态之间的过渡状态中的误差。由于实际测试时输入量是千变万化的,且往往事先并不知道,故工程上通常采用输入“标准”信号函数的方法进行分析,并据此确立若干评定动态特性的指标。常用的“标准”信号函数是正弦函数与阶跃函数,因为它们既便于求解又易于实现。本节将分析传感器对正弦输入的响应(频率响应)和阶跃输入的响应(阶跃响应)特性及性能指标。
1.2.2.1 传感器的频率响应特性
将各种频率不同而幅值相等的正弦信号输入传感器,其输出正弦信号的幅值、相位与频率之间的关系称为频率响应特性。
设输入幅值为X、角频率为ω的正弦量
x=Xsinωt
则获得的输出量为
y=Ysin(ωt+φ)
式中,Y、φ——分别为输出量的幅值和初相角。
将x、y的各阶导数代入动态模型表达式(1-3),可得

式(1-18)将传感器的动态响应从时域转换到频域,表示输出信号与输入信号之间的关系随着信号频率而变化的特性,故称之为传感器的频率响应特性,简称频率特性或频响特性。其物理意义是:当正弦信号作用于传感器时,在稳定状态下的输出量与输入量之复数比。在形式上它相当于将传递函数式(1-4)中之s置换成(jω)而得,因而又称为频率传递函数。其指数形式为
由此可得频率特性的模

称为传感器的动态灵敏度(或称增益)。A(ω)表示输出、输入的幅值比随ω而变,故又称为幅频特性。
以 分别表示A(ω)的实部和虚部,频率特性的相位角
分别表示A(ω)的实部和虚部,频率特性的相位角

代表输出超前于输入的角度。对传感器而言,φ通常为负值,即输出滞后于输入。φ(ω)表示φ随ω而变,称之为相频特性。
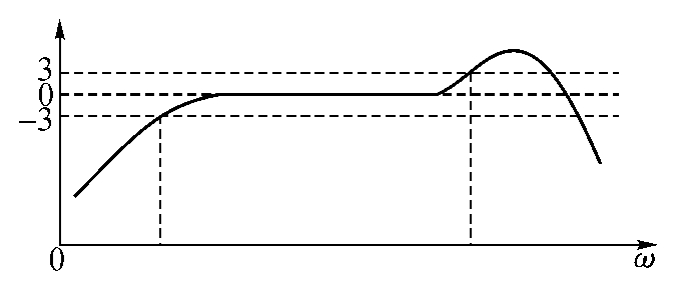
图1-6 典型的对数幅频特性
由于相频特性与幅频特性之间有一定的内在关系,因此表示传感器的频响特性及频域性能指标时主要用幅频特性。图1-6是典型的对数幅频特性曲线。图中0dB水平线表示理想的幅频特性。工程上通常将±3dB所对应的频率范围作为频响范围(又称通频带,简称频带)。对于传感器,则常根据所需测量精度来确定正负分贝数,所对应的频率范围即为频响范围(或称工作频带)。
有些传感器技术指标中还给出相位误差,它是指在频响范围内的最大相位移。
对于某些可以用二阶系统描述的传感器,有时给出其固有频率ωn与阻尼比ξ来表示频响特性。
1.2.2.2 传感器的阶跃响应特性
当给静止的传感器输入一个单位阶跃信号

时,其输出信号称为阶跃响应。衡量阶跃响应的指标可参见图1-7,有
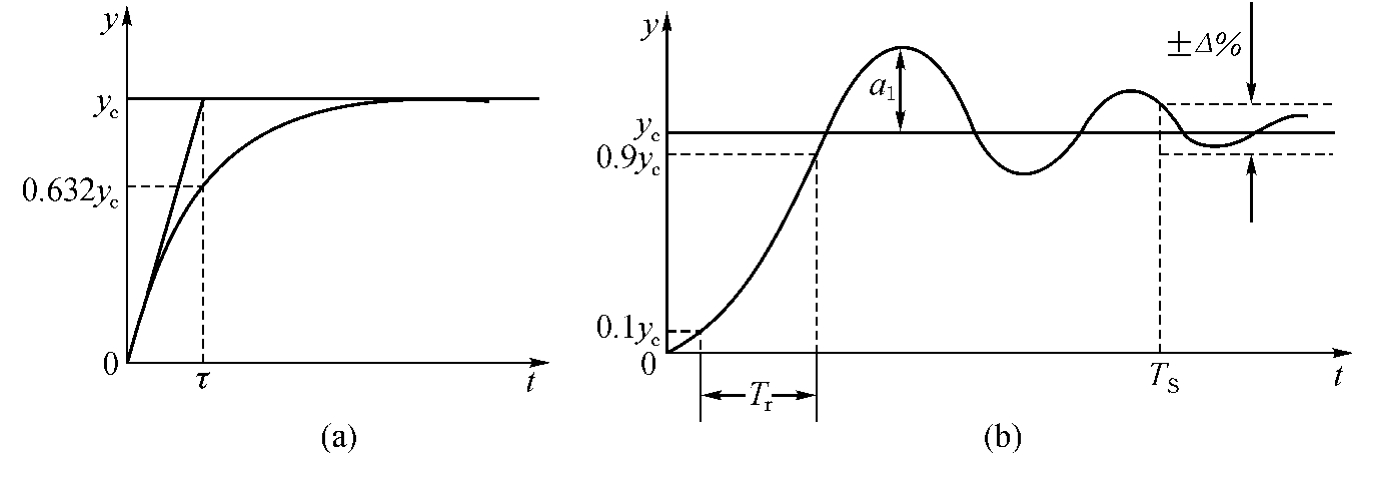
图1-7 阶跃响应曲线
(a)一阶系统;(b)二阶系统
(1)时间常数τ 传感器输出值上升到稳态值yc的63.2%所需的时间。
(2)上升时间Tr 传感器输出值由稳态值的10%上升到90%所需的时间,但有时也规定其他百分数。
(3)响应时间Ts 输出值达到允许误差范围±Δ%所经历的时间,或明确为“百分之Δ响应时间”。
(4)超调量a1 响应曲线第一次超过稳态值之峰高,即a1=ymax-yc,或用相对值a=[(ymax-yc)/yc]×100%表示。
(5)衰减率ψ 指相邻两个波峰(或波谷)高度下降的百分数: ×100%。
×100%。
(6)稳态误差ess 系无限长时间后传感器的稳态输出值与目标值之间偏差δss的相对值:ess=(δss/yc)×100%。
1.2.2.3 传感器典型环节的动态响应
常见的传感器通常可以看成是零阶、一阶或二阶环节,或者是由上述环节组合而成的系统。因此,下面着重介绍最基本的零价、一阶、二阶环节的动态响应特性。
1.零阶环节
零阶环节的微分方程和传递函数分别为

式中,K——静态灵敏度。
可见零阶环节的输入量无论随时间怎么变化,输出量的幅值总与输入量成确定的比例关系,在时间上也无滞后。它是一种与频率无关的环节,故又称比例环节或无惯性环节。
实际应用中,许多高阶系统在变化缓慢、频率不高的情况下,都可以近似看作零阶环节。
2.一阶环节
一阶环节的微分方程为

令 τ= 0——时间常数;
0——时间常数;
K= ——静态灵敏度。
——静态灵敏度。
则式(1-24)变成
τs+1)y=Kx (1-25)
其传递函数和频率特性分别为

幅频特性和相频特性分别为

A(ω)与φ(ω)如图1-8所示,图中坐标为对数坐标,称为伯德图。

图1-8 一阶环节的伯德图
为使输出量不失真,要求A(ω)近似为常值,时间滞后φ(ω)/ω也近似为常值;由式(1-28)、式(1-29)和图1-8可知,应满足ωτ《1。这时A(ω)≈K,φ(ω)≈-ωτ,φ(ω)/ω≈-τ,即输出量相对于输入量的滞后与ω基本无关。
当输入阶跃函数 的
的
解为
y=KA(1-e-t/τ) (1-30)
其响应曲线如图1-7(a)所示。
由式(1-30)和图1-7可知,当响应时间为Ts时,动态误差为

当Ts=3τ时,ed=0.05,Ts=5τ时,ed=0.007。可见,一阶环节输入阶跃信号后在t>5τ之后采样,可认为输出已接近稳态,其动态误差可以忽略。
反过来,若已知允许的稳态误差值,也可由式(1-31)计算出所需的响应时间。
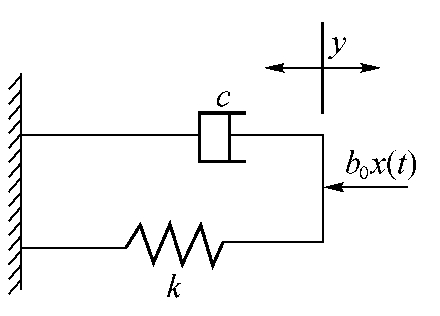
图1-9 一阶环节实例
综上所述,一阶环节的动态响应特性主要取于时间常数τ;τ小,阶跃响应迅速,频率响应的上截止频率高。τ的大小表示惯性的大小,故一阶环节又称为惯性环节。
图1-9所示由刚度为k的弹簧和阻尼系数为c的阻尼器组成的机械系统,是一阶环节在传感器中的应用实例。其时间常数
τ=c/k
3.二阶环节
二阶环节的微分方程为

令  ——静态灵敏度;
——静态灵敏度;
ωn= ——固有频率;
——固有频率;
ξ= ——阻尼比。
——阻尼比。
式(1-32)可写成

其传递函数和频率响应分别为

幅频特性和相频特性分别为

图1-10 二阶环节的幅频特性与相频特性
二阶环节的幅频特性与相频特性如图1-10所示。由图可见,当ω/ωn《1时,A(ω)≈K,φ(ω)≈0,近似于零阶环节。要使频带加宽,关键是提高无阻尼固有频率ωn。当阻尼比ξ趋于0时,幅值比在固有频率附近(ω/ωn=1)变化很大,系统发生谐振。为了避免这种情况,可增大ξ值,当ξ≥0.707时,谐振就不会发生了。当ξ≈0.7时,幅频特性的平坦段最宽,而且相频特性接近于一条斜直线,在检测复合周期振动时能保证有较宽的频响范围且幅值失真与相位失真均较小。ξ≈0.7称为最佳阻尼。
若对二阶环节输入一阶跃信号,式(1-33)就变成

特征方程及其两根分别为

当ξ>1(过阻尼)时

当ξ=1(临界阻尼)时

当ξ<1(欠阻尼)时
![]()
式中,
——衰减振荡相位差。
将上述三种情况绘成曲线,可得图1-11所示二阶环节的阶跃响应曲线簇。由图可知,固有频率ωn越高,则响应曲线上升越快,即响应速度高;反之,ωn越小,则响应速度低。而阻尼比ξ越大,则过冲现象减弱;ξ≥1时完全没有过冲,也不产生振荡。ξ<1时,将产生衰减振荡,可按式(1-41)由允许误差计算响应时间Ts,或由Ts计算稳态误差ess。为使接近稳态值的时间缩短,设计时常取ξ=0.6~0.8。
当ξ=0时,式(1-41)变成y=KA[1-sin(ωnt+φ)],形成等幅振荡,这时振荡频率就是二阶环节的振动角频率ωn,称为“固有频率”。
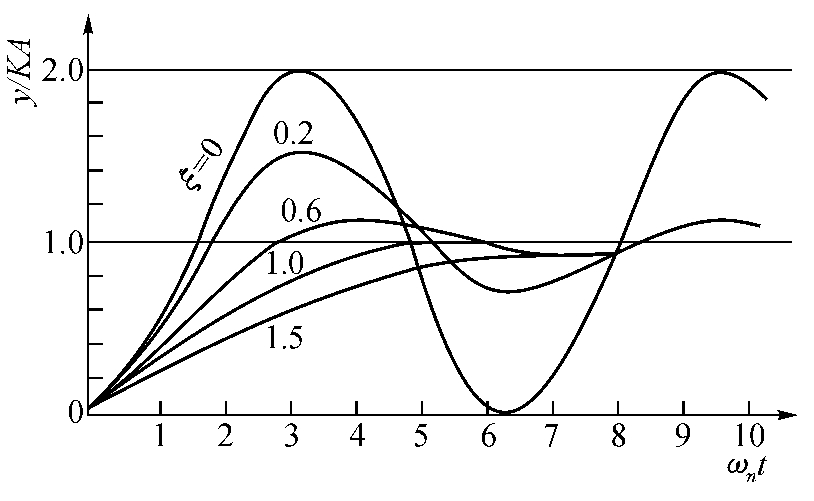
图1-11 二阶环节的阶跃响应
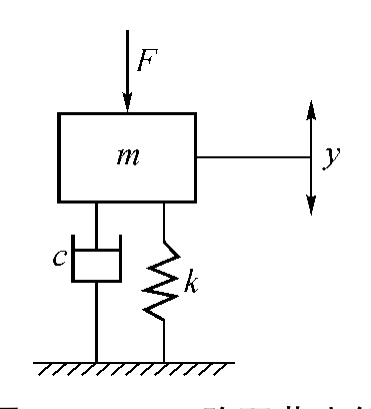
图1-12 二阶环节实例
图1-12所示由弹簧(k)、阻尼(c)和质量(m)组成的机械系统是二阶环节在传感器中的应用实例。在外力F作用下,其运动微分方程为
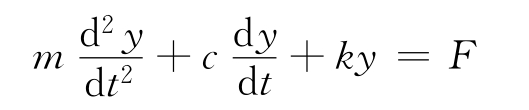
上述分析对该系统完全适用(参见图6-25和图6-26)。
必须指出:实际传感器往往比上述简化的数学模型复杂得多。在这种情况下,通常不能直接给出其微分方程,但可以通过实验方法获得响应曲线上的特征值来表示其动态响应。
对于近年来得到广泛重视和迅速发展的数字式传感器,其基本要求是不丢数,因此输入量变化的临界速度就成为衡量其动态响应特性的关键指标。故应从分析模拟环节的频率特性、细分电路的响应能力、逻辑部件的响应时间以及采样频率等诸方面着手,从中找出限制动态性能的薄弱环节来研究并改善其动态特性。
1.2.3 传感器的互换性
传感器的互换性是指它被同样的传感器替换时,不需要对其尺寸及参数进行调整,仍能保证误差不超过规定的范围。这个性能对使用者十分重要,对大规模生产过程测控用的传感器尤显必要,因为互换性可确保生产线很短的停产时间。
理论上传感器的互换性可以通过控制制造工艺和材料性能来保证,实际上高精度传感器很难做到。笔者曾对高精度电感式位移传感器进行过分析和试验,表明在现有制造工艺和材料性能的条件下无法达到所要求的互换性性能。
为了能互换,批量生产的传感器各项性能指标应完全一致。由于同一种传感器的制造工艺和所采用的材料是相同的,需要保证的通常仅输出特性的一致性。而传感器的零位通常可调,需要控制的指标就变成灵敏度 (对线性传感器)或
(对线性传感器)或 (对非线性传感器)的一致性。因此问题演变成对传感器灵敏度的控制。
(对非线性传感器)的一致性。因此问题演变成对传感器灵敏度的控制。
可见只要在构成传感器的任何环节中(视方便而定)设置一个调整灵敏度的环节,即可实现互换。就目前而言,在传感器的电系统中设置调整环节最为方便。例如,对电压输出型传感器,在输出端增加图1-13所示分压网络,通过调整r1或r2就能达到灵敏度的一致。笔者曾用这种方法,加上零位电压补偿电阻,对数十只电感式位移传感器进行调整,成功地实现了互换,精度达到±0.5%。由于元器件的微小型化,调整电路可安装在输出插头内。
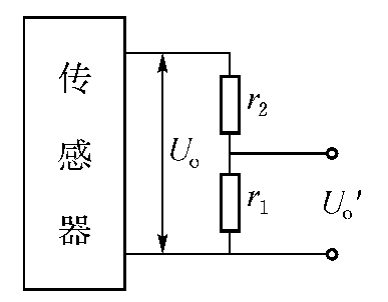
图1-13 分压网络
需要指出的是,有些传感器由于激励源和后续电路的原因,还需要对输入、输出阻抗进行控制。对于两只或两只以上传感器并联使用时尤其要重视。因为输入量变化时,各传感器的输入、输出阻抗往往会产生不同的变化,引起输出值的附加变化,其值常常不可忽略。
1.2.4 传感器的性能指标一览
由于传感器的类型五花八门,使用要求千差万别,要列出可用来全面衡量传感器质量优劣的统一指标极其困难。迄今为止,国内外还是采用罗列若干基本参数和比较重要的环境参数指标的方法来作为检验、使用和评价传感器的依据。表1-2列出了传感器的一些常用指标,可供读者参考。
表1-2 传感器性能指标一览

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










