



【摘要】:如图10-11所示装置是通过连杆机构将气缸4活塞杆的直线运动转换成拉门的开闭运动,利用超低压启动阀来检测行人的踏板6和11动作。在拉门内、外装踏板6和11,踏板下方装有完全封闭的橡胶管,管的一端与超低压气动阀7和12的控制口连接。首先使手动阀1上位接入工作状态,空气通过气动换向阀2、单向节流阀3进入气缸4的无杆腔,将活塞杆推出(门关闭)。减压阀13可使关门的力自由调节,十分便利,如将手动阀复位,则可变为手动门。
10.5.1 拉门自动开闭系统
如图10-11所示装置是通过连杆机构将气缸4活塞杆的直线运动转换成拉门的开闭运动,利用超低压启动阀来检测行人的踏板6和11动作。在拉门内、外装踏板6和11,踏板下方装有完全封闭的橡胶管,管的一端与超低压气动阀7和12的控制口连接。当人站在踏板上时,橡胶管里压力上升,超低压气动阀动作。
首先使手动阀1上位接入工作状态,空气通过气动换向阀2、单向节流阀3进入气缸4的无杆腔,将活塞杆推出(门关闭)。当人站在踏板6上后,气动控制阀7动作,空气通过梭阀8、单向节流阀9和气缸10使气动换向阀2换向,压缩空气进入气缸4的有杆腔,活塞杆退回(门打开)。
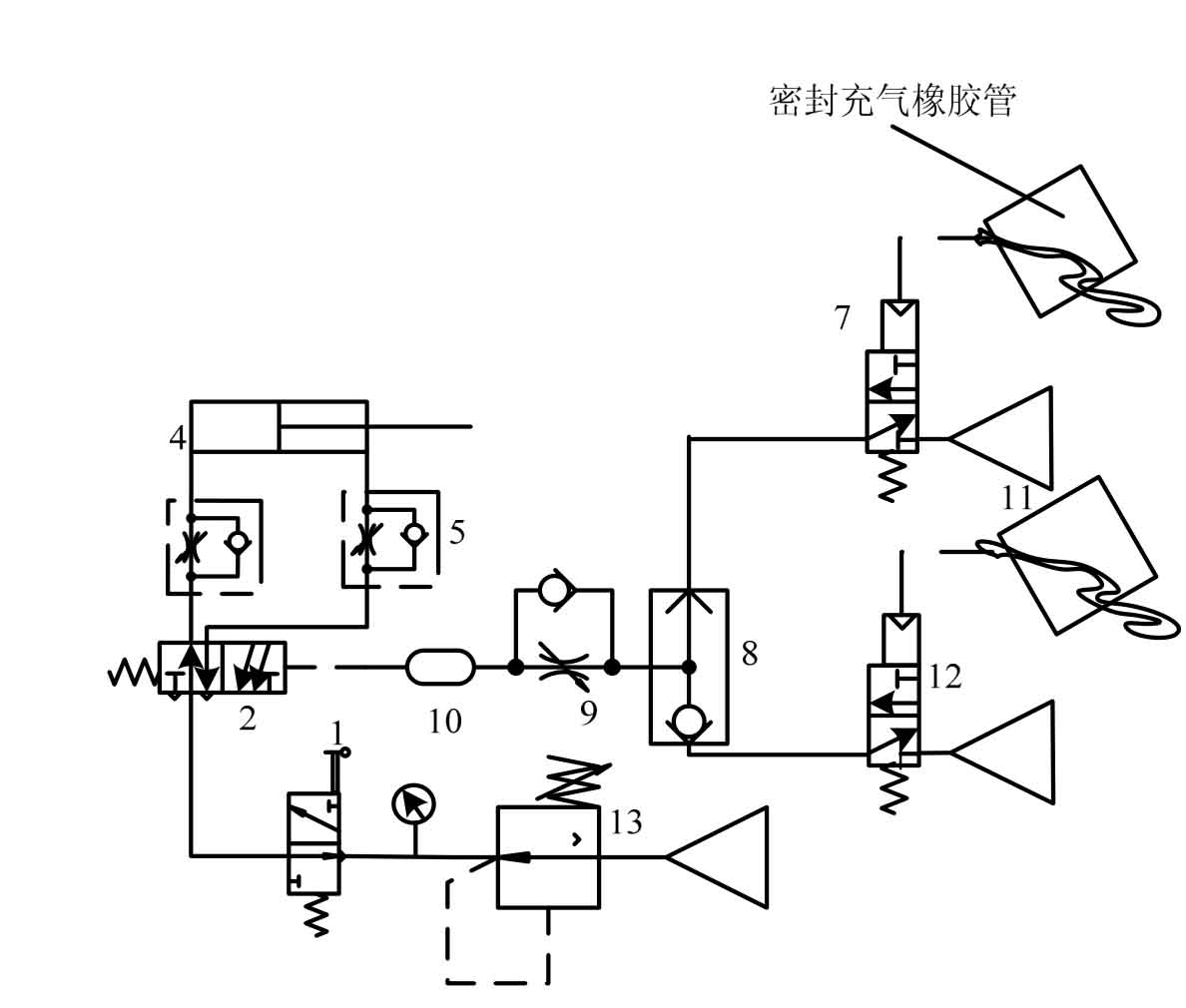
图10-11 拉门自动开闭系统
1-手动阀;2-换向阀;3,5,9-单向节流阀;4,10-气缸
6,11-踏板; 7,12-超低压气动阀;8-梭阀;10-气罐;13-减压阀
行人经过门后踏上踏板11时,气动控制阀12动作,使梭阀8上面的通口关闭,下面的通口接通(此时由于人已离开踏板6,阀7已复位),气罐10中的空气经单向节流阀9、梭阀8和阀12放气(人离开踏板11后,阀12已复位),经过延时(由节流阀控制)后阀2复位,气缸4的无杆腔进气,活塞杆伸出(关闭拉门)。
该回路利用逻辑“或”的功能,回路比较简单,很少产生误动作。行人从门的哪一边进出均可。减压阀13可使关门的力自由调节,十分便利,如将手动阀复位,则可变为手动门。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










