



7.3.2 定时器指令
在数控机床梯形图编制中,定时器是不可缺少的指令,用于程序中需要与时间建立逻辑关系的场合。功能相当于一种通常的定时继电器(延时继电器)。FANUC系统PMC的定时器按时间设定形式分为可变定时器(TMR)和固定定时器(TMRB)两种。
1.可变定时器(TMR)
TMR指令的定时时间可通过PMC参数进行更改,指令格式和工作原理如图7-16所示。指令格式包括三部分,分别是控制条件、定时器号和定时继电器。
控制条件:当ACT=0时,输出定时继电器TM01=0;当ACT=l时,经过设定延时时间后,输出定时继电器TM01=1。

图7-16 可变定时器的指令格式和工作原理
定时器号:PMC-SA3为1~40个,其中1、8号最小单位为48ms(最大为1572.8秒);9号以后最小单位为8ms(最大为262.1秒)。定时器的时间在PMC参数中设定(每个定时器占两个字节,以十进制数直接设定)。
定时继电器:作为可变定时器的输出控制,定时继电器的地址由机床厂家设计者决定,一般采用中间继电器。
定时器工作原理如图7-16b所示。当控制条件ACT=1时,定时器开始计时,到达预定的时间后,定时继电器TM01接通;当控制条件ACT=0时,定时继电器TM01断开。
图7-17为某数控机床利用定时器实现机床报警灯闪烁的例子。
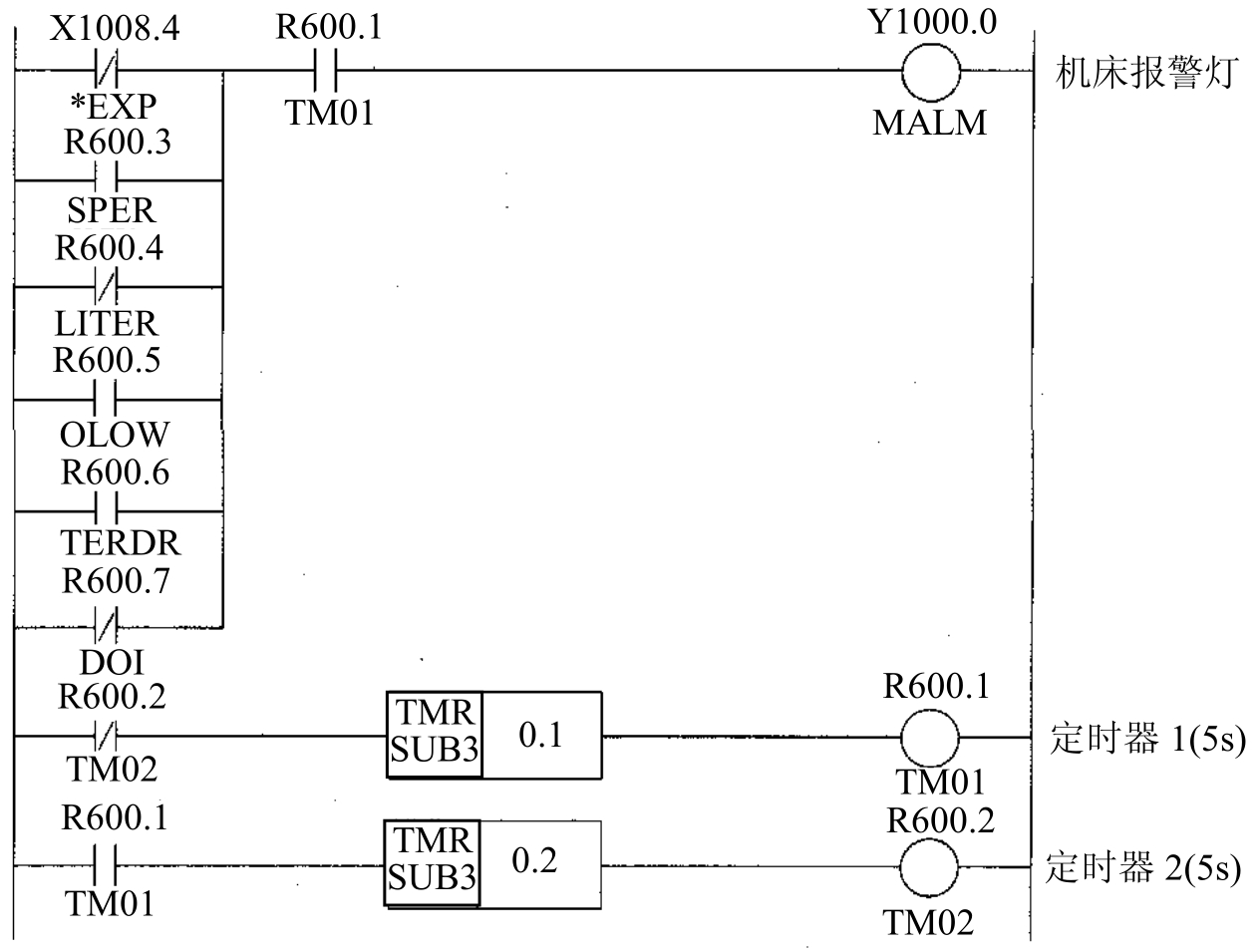
图7-17 实现机床报警灯闪烁的梯形图
图7-17中X1008.4为机床急停报警,R600.3为主轴报警,R600.4为机床超程报警,R600.5为润滑系统油面过低(润滑油不足)报警,R600.6为自动换刀装置故障报警,R600.7为自动加工中机床的防护门打开报警。当上面任何一个报警信号输入时,机床报警灯(Y1000.0)都闪亮(间隔时间为5s)。通过PMC参数的定时器设定画面分别输入定时器01、02的时间设定值(5000ms)。
2.固定定时器(TMRB)
在梯形图中设定TMRB的时间,在指令和定时器号的后面加上一项预设定时间参数,与顺序程序一起被写入FROM中,因此定时器的时间不能用PMC参数改写。固定定时器一般用于机床固定时间的延时,不需要用户修改时间。如机床换刀的动作时间、机床自动润滑时间等的控制。图7-18为固定定时器的指令格式和应用实例。
固定定时器的指令格式如图7-18a所示,包括以下几部分:
控制条件:当ACT=0时,输出定时继电器TM03=0;当ACT=1时,设定延时时间后,输出定时继电器TM03=1。
定时器号:PMC-SA3共有100个,编号为001~100。
设定时间:设定时间的最小单位为8ms,设定范围为8~262136ms。
定时继电器:作为可变定时器的输出控制,定时继电器的地址由机床厂家决定,一般采用中间继电器。
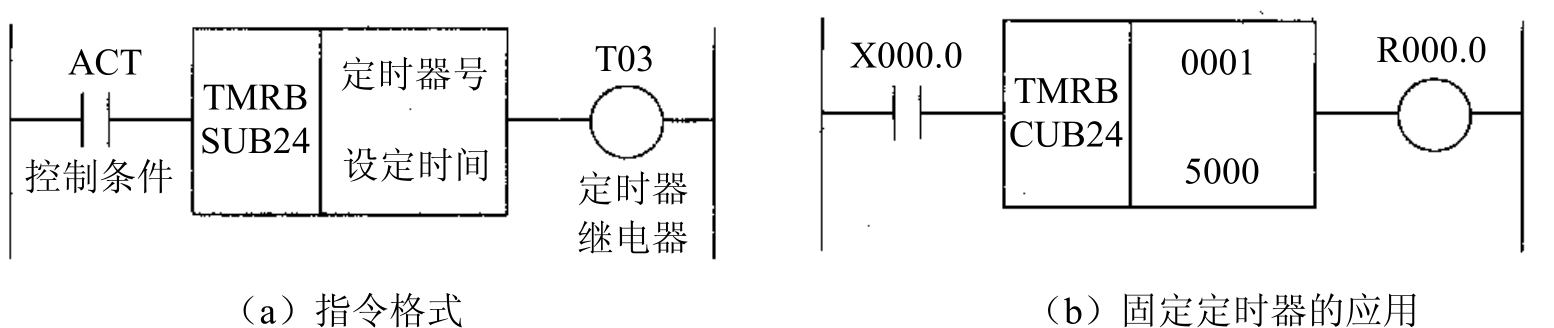
图7-18 固定定时器的指令格式和应用
图7-18(b)为应用实例,表示当X000.0为1时,经过5000ms的延时,定时继电器R000.0为“1”。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










