



人通过感觉器官感知,认识外部世界的一切。用耳朵听音乐、话音、机器的轰隆声、钟声、铃声等一切通过声音传递的信息;用手感觉温度、物体的硬软以及物质的存在;用眼睛观察外部世界的形状、颜色、运动状态、速度、位置、识别物体的种类等等。人的眼睛之所以可以看见外部世界,是因为太阳光谱中的可见光照射在物体上反射的结果。那么除了“可见光谱”之外还存在别的“不可见的光谱”吗?事实上,广义的光谱按频段的不同,有大家所熟悉的电磁波、远红外、近红外、可见光、紫外光谱,而可见光谱区中,红色的光波长最长 ,紫色的波长最短。而且人们已经发现不同的物质辐射不同的谱线,在特定的条件下还可以只辐射某一单一波长的谱线,当其人们发现不可见光谱区中的单一的光谱谱线具有可贵的特性的时候,就力图去产生、开发、利用这种单一光谱谱线,由此产生了激光及用于不同场合的激光系统。
视觉引发人们的形象思维,眼睛从外界事物所获取的信息量大,直接而快速,是其他感觉器官所不能代替的,这也就是古人所说的“眼见为实”的深切内涵。正是因为这个道理,人们不愿受限于“可见光”的可见,而想去探求自然光条件下所看不见的东西,如想在漆黑的夜晚,去观察外部世界,就开发出了“夜视仪”。被动“红外热成像仪”也不是依赖于可见光的反射特性去观察变幻莫测的外部世界的,而是依赖于物体本身的热辐射,无论白天或黑夜都可以用以观察人类世界的一切,而且已经是超视距的。目前最新的热成像仪,1ms内热敏成像。红外成像高速测温用来检测来复枪,其射出的弹头在弹道上飞行速度为840m/s,弹头距枪口0.914 4m处的热成像还能分辨出弹头上不同部位摩擦热的温差。
遥感仪则可以依据物体本身的辐射谱线,包括电磁波段与红外光区,远距离成像,把肉眼原本看不见的自然变化,转化为可见,以照片的形式或屏幕显示的图像,甚至动态图像的形式展现出来,这就是当今人们感兴趣的可视化技术。人们力图从各个领域做这方面的研究和开发应用。
通过眼睛人们能够确定方向——定位,作为控制手的动作的依据,当然这是受限于“视距”之内的,通过望远镜可以延伸视距;但是“定位”的精度达不到人们通用目的需要,所谓“差之毫厘,失之千里”。雷达满足了远距离定位和精度的要求,雷达源于英文Radio Detection And Ranging的缩写RADAR,于1935年问世。
当其“激光”这种波长处于红外光谱波段的“激光光源”被研究出来之后,人们自然想到利用微米波段(红外光谱波段)的光波作为信息的载体去探测、获取其他手段难于探测、观测到的目标的信息。激光雷达研制成功后,相继激光成像雷达应运而生。激光雷达的英文名字“LADAR”是Laser Detection And Ranging的缩写。激光雷达的研究是从目标探测和测距入手的,早期(1962~1976年)的研究系统被称为光雷达(Optical RADAR),并命名为LIDAR(Light Detection And Ranging)。可以说军事应用对测量系统精确度的要求日渐严格,武器系统的投放精度以及避免敌方电子干扰的需求,大大推动了激光雷达的发展。表6-1列举了1970年以前研制成功并投入使用的一两种激光雷达系统的性能参数,以展现它所独具的优越性。
表6-1 激光雷达
可以看出,早期研制的激光雷达从功能上与20世纪初问世的利用电磁波探测目标的雷达是极其相似的,是以定位——测量目标位置(距离、方位、速度)为主;但是激光雷达的测量精度及分辨率是独具特色的,它能以特别高的“角精度”和“距离精度”完成目标定位。这是电磁波雷达难以达到的,同时激光雷达在军事对抗环境中的有效性,通过多年实际应用也得到了证实。
激光成像雷达属于红外光谱段的主动成像系统,它是继红外被动成像以及前面讲述的“定位型激光雷达”之后被开发出来的一种探测目标及目标成像的工具。激光的波长是微米(10−6m)量级,即使与电磁波中最短的毫米波相比也是几个量级的差别。比如,前面讲述的1.54μm激光为例,其与电磁波段中3mm的毫米波的波长相比,两者相差近2000倍。而雷达的许多技术参数是与波长密切相关的,此为激光雷达所独具特色,也是激光雷达优越的原因所在。比如说雷达的一个重要技术参数:角分辨率,就与波长成正比关系,这就意味着短的激光波长很容易获得窄的光束,高的角分辨率。角分辨率的概念是指雷达定位时能够确定方向的最小度量。定量地比较一下,就明白了,激光雷达很容易获得0.2~1.5mrad(毫弧度)的角分辨率;而对于电磁波,即使是毫米波,如3mm雷达获得1°(17.45mrad)的角分辨都不太容易(特别是用于天线尺寸受限的场合),或者说需要近2000倍那么大的天线孔径才能达到毫弧度量级的角分辨率。可以达到的波束宽度的差异,给雷达系统功能带来了巨大的不同。比如,10km以外的一架飞机或一辆卡车,用微波雷达观测时,以2°的角分辨率,10km以外波束覆盖将近350m的范围,整个飞机或卡车完全落在波束之内,这意味着当波束内出现一个不同距离的目标,只可能产生一个反射回波信号,荧屏上显示出一个点。这种波束覆盖与目标尺寸相比之下,称之为点目标。而激光雷达就不同了,由于其波束相对较窄,波束不可能完全笼罩整个目标,以0.2mrad的角分辨率为例,5km处波束覆盖范围是1m,6m长的卡车,一次扫描可以获得6个以上的回波信号。波束覆盖与目标尺寸相对而言,称之为体目标。而且往往为了照射能量集中,有意要求将光束压得很窄,这样一来,即使在同一“飞机”或“车辆”上,照射点不同,所能获得的回波信号严格说来是不相同的。激光成像雷达就是基于这点,设法提取和利用返回信号的差别及其所包含的多维信息,经过处理再恢复出被探测目标的形体。通过显示器显示出目标的形状及三维图像,通过它,人们很容易直观地分辨出目标的类型甚至型号和国别。显然,与其只能发现目标的存在(有或无)的雷达功能相比,激光成像雷达不仅可以定位,而且还能观测视距之外目标形体,具有突出的特点和优势。这也就是人们力图开发激光波段的原因之一吧!
激光成像雷达又是如何将被探测对象显示给观察者的呢?下面简略地介绍它们的工作原理。就最简单的激光成像雷达而言,首先,激光器发射具有一定峰值功率的光脉冲,通过一个扫描光学系统,这个光学系统一方面能对激光光束准直,也就是把光源发射的激光的束散角按要求修正成需要的光束形状,而且在一定空间范围内按一定规律扫描。扫描器每扫到一定位置,就发射光脉冲,并且几乎同时接收目标返回的回波脉冲。每个回波脉冲应该携带了目标的信息,例如,对静止的目标,携带的目标被照射点与雷达之间的相对的距离信息,还有就是由目标反射特性等因素决定的反映在回波强度上的目标信息。如果是运动目标,还可以提取目标的运动速度等信息。目标的方位信息是由扫描器的瞬时位置决定的。目标返回光由接收光学系统搜集并聚集在光探测器上,光探测器完成光电转换,将接收到的光能量转换成电信号。由光探测器探测到的回波信号往往叠加有相当的噪声,同时还被传输信道的噪声所调制;接收机则需要抑制噪声,增强有用信号,并分别提取目标的距离与强度信息,将其映射在显示屏幕上,就可以看见扫描视场内整个目标的分布情况。往往激光雷达的扫描器的扫描规律与显示器屏幕的扫描规律是不一致的,因此,要想呈现出探测视场的场景,还需完成一定的映射变换,也就是需按显示器扫视的规律,还原恢复出被探测的目标的图像来。在重建恢复图像的同时,完全可以确定目标方位,俯仰以及各个目标各点的距离值;并且将目标的图像直观地显示在屏幕上,使观察者一目了然,清楚地看到被探测的空间范围内有些什么目标,各自的相对位置,目标的大小、高低、形状等信息。为了方便观察者观测、判断,往往利用彩色距离标尺,以区别不同的距离,对特定的区域还可报出距离数值。
下面给出几组实际成像结果的照片,通过这些照片,帮助读者建立感性认识。第一组包含了五幅照片,这五幅照片是用半导体激光器作发射光源在实验室内,近距离(3~5m)成像的结果,如图6-1所示。从图中照片(a)~(e)分别可以看出激光成像可以分辨海棠花叶片上的叶脉,仪器的小旋扭,茶杯上的花纹,金属支架的空格图案,玩具汽车表面不同颜色的图案等。图6-1(f)所示为被成像对象的实物照片。
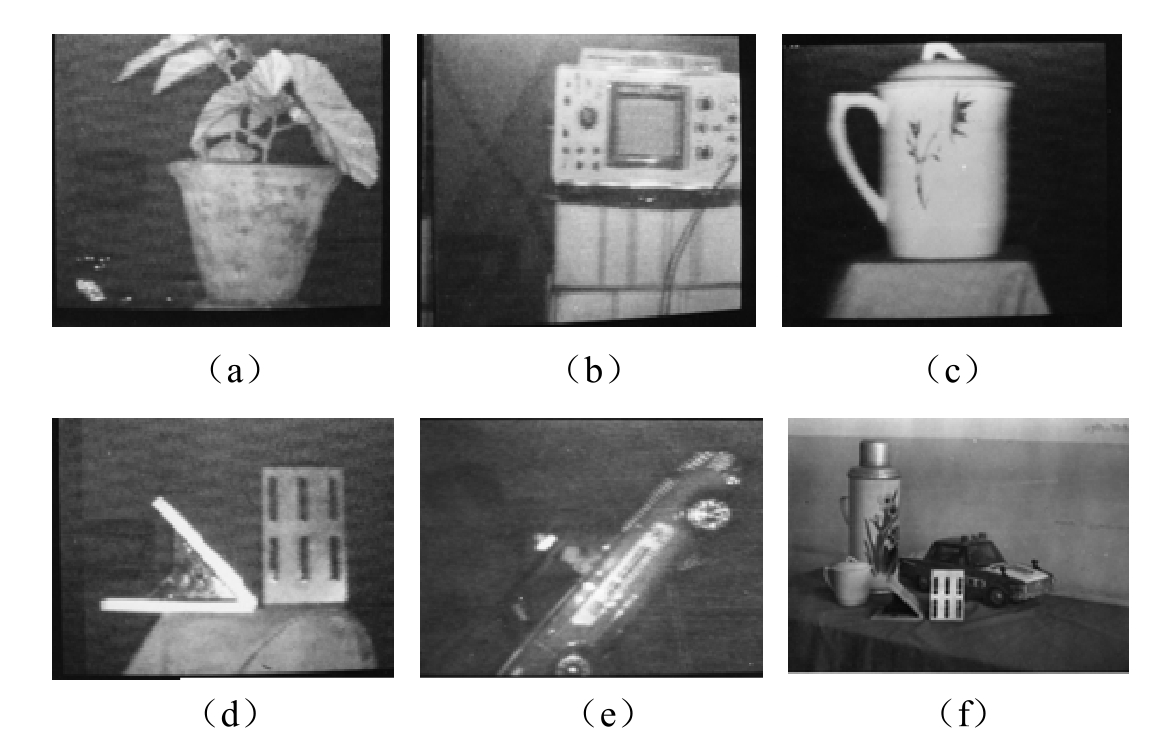
图 6-1
第二组照片是用CO2激光器作发射光源,远距离成像的结果,如图6-2所示。其中图6-2(a)是楼房顶上的天线,距离700m;图6-2(b)是1.5km处的吊车以及后面建筑物的窗户;图6-2(c)是3km的楼房及2km处的吊车臂。
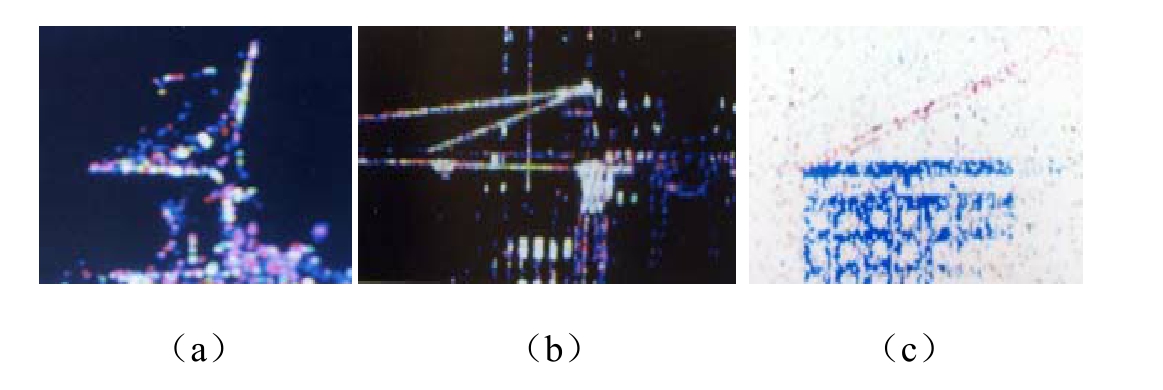
图6-2 CO2激光扫描远距离物体成像照片
第三组照片是用固体激光器作发射源的激光雷达对电缆、电话线、电杆等线状目标成像以及水塔、烟囱等建筑物成像的照片,如图6-3所示。图6-3(a)、图6-3(b)对比了实物照片及激光成像雷达所成图像的照片。激光成像雷达可以探测架空电线,而且用彩色分辨出232.5m的电线与远在512m处的高压塔和电缆,这一点在普通照片上是难以分辨的。图6-3(c)给出了301m的电杆、电话线以及远处的树木、空间的架空线等;图6-3(d)、图6-3(e)给出了建筑物、烟囱、水塔的实况照片和激光成像结果的照片。最远的目标大约为1.5km,激光成像雷达无论阳光明暗,均能按不同距离分辨出目标的层次。
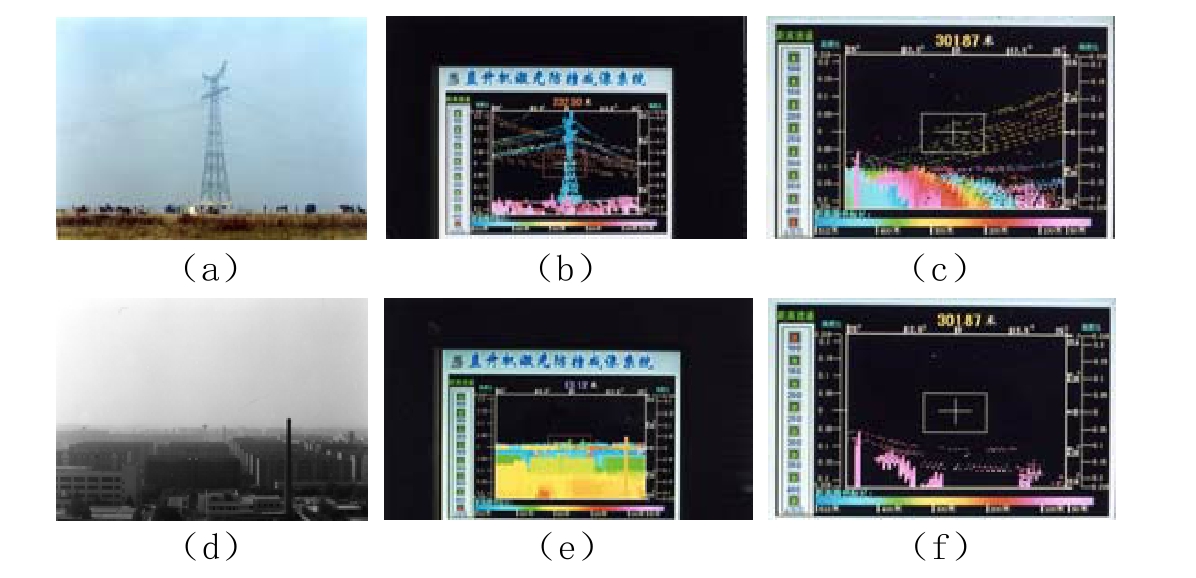
图 6-3
激光雷达有局限性吗?事物总是存在两面性的,有优势的一面,就同时存在劣势的一面。激光波长短,很容易获得高的角分辨率,有利于观测小的目标,雷达系统体积小,重量轻,激光成像雷达具有实时探测和实时目标三维成像功能,几乎不受地杂波影响,可用于探测低空目标或战地侦察等。激光雷达能以相对低的成本获得高的测距精度,因此一经诞生就已经应用于地面、飞机、舰船、空间平台上对人们所感兴趣的目标进行测距和跟踪显示,跟踪卫星也是其主要应用之一。然而也是因为波长短,波长与大气中存在的微粒的尺度可以比拟,也就是说,传播过程中,当与云、雾、雨中的小水滴相遇时,存在折射与反射现象,其每公里衰减量大致为毫米波段的40倍,到达被探测目标的能量由此而减弱。大气对光波的吸收和散射作用导致激光能量随传播距离呈指数衰减,衰减系数又随其传播路径状况不同而有较大变化。同时,由云层、雾等所产生的漫反射,部分返回到接收机的探测器,构成了“噪声”叠加在有用的被探测目标的反射信号上,不利于有用信号的接收。所以,一般意义上它受天气条件和气候的影响较大,晴天的“有云”与“无云”,甚至白天与黑夜传播条件都不一样,对接收信号影响较大,雾天、雨天影响更大;但大气外层空间传播条件较好,有利于激光雷达的应用。除了前述的跟踪卫星这一主要用途之外,还由于它具有高的定位精度,与三维成像的能力,已被用于外层空间的飞行器对接等场合。此外,由于激光雷达的传输损耗较大,雷达系统作用距离受限,但其受地杂波影响较小,或者说几乎不受影响;而电磁波雷达因受地杂波的影响,低空环境几乎是它的死区,所以激光雷达低空环境应用于探测小的目标,以及目标成像,可以说直升飞机激光防撞雷达,是在直升机现存防撞手段中最具优势的一种,它可以帮助飞行员清晰地看见飞行前方500m处是否存在电线类的障碍物。设计优良的激光成像雷达用来做战地侦察,不仅能确定目标的相对距离和位置,而且还可以分辨出武器装备的类型甚至国别。除此之外,也适用于单兵应用。激光成像雷达用来做机器人视觉系统,可以获得准确的三维定位。
总之,人们为了拓宽、扩展人类的视觉功能,研究、开发出了不同频段的多种视觉传感器,激光成像雷达属一种主动式的三维成像传感器,激光成像雷达具有精确测距能力,独具实时获取目标三维成像的功能,弥补了红外被动成像的不足;距离分辨率可达到厘米量级,优于微波甚至毫米波雷达。激光成像雷达独具特点但也有不足,多种传感的综合利用才能拓宽人类的视野。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。









