



9.2 大众车系CAN数据总线系统
9.2.1 大众车系采用CAN数据总线的过程
1997年PASSAT的舒适系统上采用了传输速率为62.5kbit/s的CAN-BUS;
1998年PASSAT和Golf的驱动系统上增加了传输速率为500kbit/s的CAN数据总线;
2000年大众公司在PASSAT和Golf上都采用了带有网关的第2代CAN数据总线;
2001年大众公司提高了CAN数据总线的设计标准,将舒适系统CAN数据总线的传输速率提高到100kbit/s,驱动系统的传输速率提高到500kbit/s;
2002年大众集团在新PQ24平台上使用带有车载网络控制单元的第3代CAN数据总线;
2003年大众集团在新PQ35平台上使用5重结构的CAN数据总线系统,并且出现了单线的LIN数据总线。
9.2.2 大众车系CAN网络的类型
大众汽车的CAN总线系统设定为驱动系统、舒适系统、信息系统、仪表系统、诊断系统这5个局域网。

图9-3 大众汽车的CAN总线系统
9.2.3 CAN系统的5个子系统
1.驱动系统CAN总线
驱动系统CAN总线由15号线激活,采用双线式数据总线,其传输速率为500kbit/s,所以也称为高速CAN总线。控制单元通过CAN驱动数据总线的CAN-H线和CAN-L线来进行数据交换。

图9-4 驱动系统CAN总线的组成图
(1)驱动系统的组成:驱动系统CAN总线连接发动机控制单元、变速箱控制单元、制动ESP控制单元、安全气囊控制单元、电子驻车制动控制单元、大灯照程调节系统控制单元等。
(2)驱动系统CAN总线的数据传递:为了提高数据传递的可靠性,CAN数据总线系统的两条导线(双绞线)分别用于不同数据的传送,这两条线分别称为CAN-H线和CAN-L线。
驱动系统CAN总线的负载电阻:最初的数据总线的两个末端有两个终端电阻,而大众车系使用的是分配式电阻,即发动机控制单元内的“中央末端电阻”和其他控制单元内的高欧姆电阻。
(3)驱动系统CAN总线具有如下特点:
①500kbit/s高速传输。
②级别CAN/C。
③采用双绞线:CAN-H线为橙色/黑色,CAN-L线为橙色/棕色。
④在一根线断路/短路时,所有功能都会停止。
2.舒适系统CAN总线
舒适系统CAN总线由30号线激活,采用双线式数据总线,CAN驱动数据总线的CANH线和CAN-L线来进行数据交换,其传输速率为100kbit/s,所以也称为低速CAN总线。
(1)舒适系统的组成:舒适系统CAN总线连接空调控制单元、停车辅助控制单元、挂车控制单元、蓄电池能量管理单元、车门控制单元、电子转向柱锁控制单元、驻车加热控制单元、轮胎气压监控控制单元以及多功能方向盘、电子记忆座椅等控制单元。

图9-5 舒适系统CAN总线的组成图
(2)舒适系统CAN总线的数据传递:为了使低速舒适系统CAN总线抗干扰性强且电流消耗低,大众车系使用了单独的驱动器(功率放大器)。舒适系统CAN总线的CAN-H线和CAN-L线不是通过电阻相连的,而是彼此独立作为电压源来工作。
(3)舒适系统CAN总线具有如下特点:
①传输率100kbit/s。
②级别CAN/B。
③采用双绞线:CAN-H线为橙色/绿色,CAN-L线为橙色/棕色。
3.信息娱乐系统
多媒体,DVD,电视机,收音机,GPS,车载电话等。
4.仪表系统
车辆信息画面显示系统如图9-6所示。所谓车辆信息画面显示是指根据从组合仪表得到的各种信息,通过安装在仪表板中央上部的多功能显示屏显示油耗或行驶距离等信息。
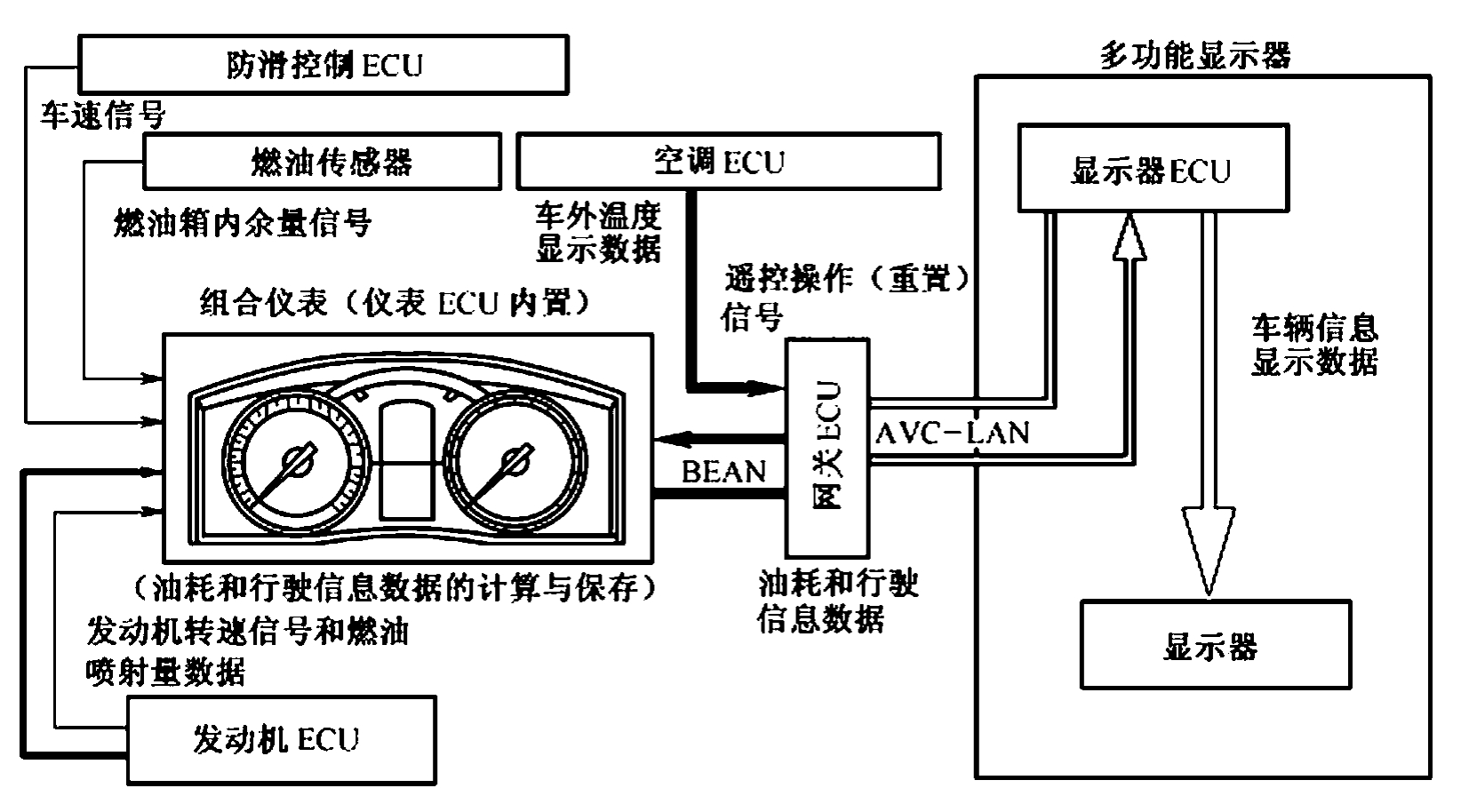
图9-6 车辆信息画面显示系统的工作过程图
5.诊断总线
诊断总线用于诊断仪器和相应控制单元之间的信息交换,它被用来代替原来的K线或者L线的功能。如图9-7所示。

图9-7 诊断总线通过网关连接各控制器
9.2.4 丰田锐志轿车电动车窗系统
特点:丰田锐志轿车所有座位车门玻璃均具有防夹功能和点火钥匙断开操作功能。防夹功能不仅在自动上升操作时起作用,在手动上升操作时也起作用。
1.电动车窗系统的组成部件
电动车窗系统的组成部件如图9-8所示。
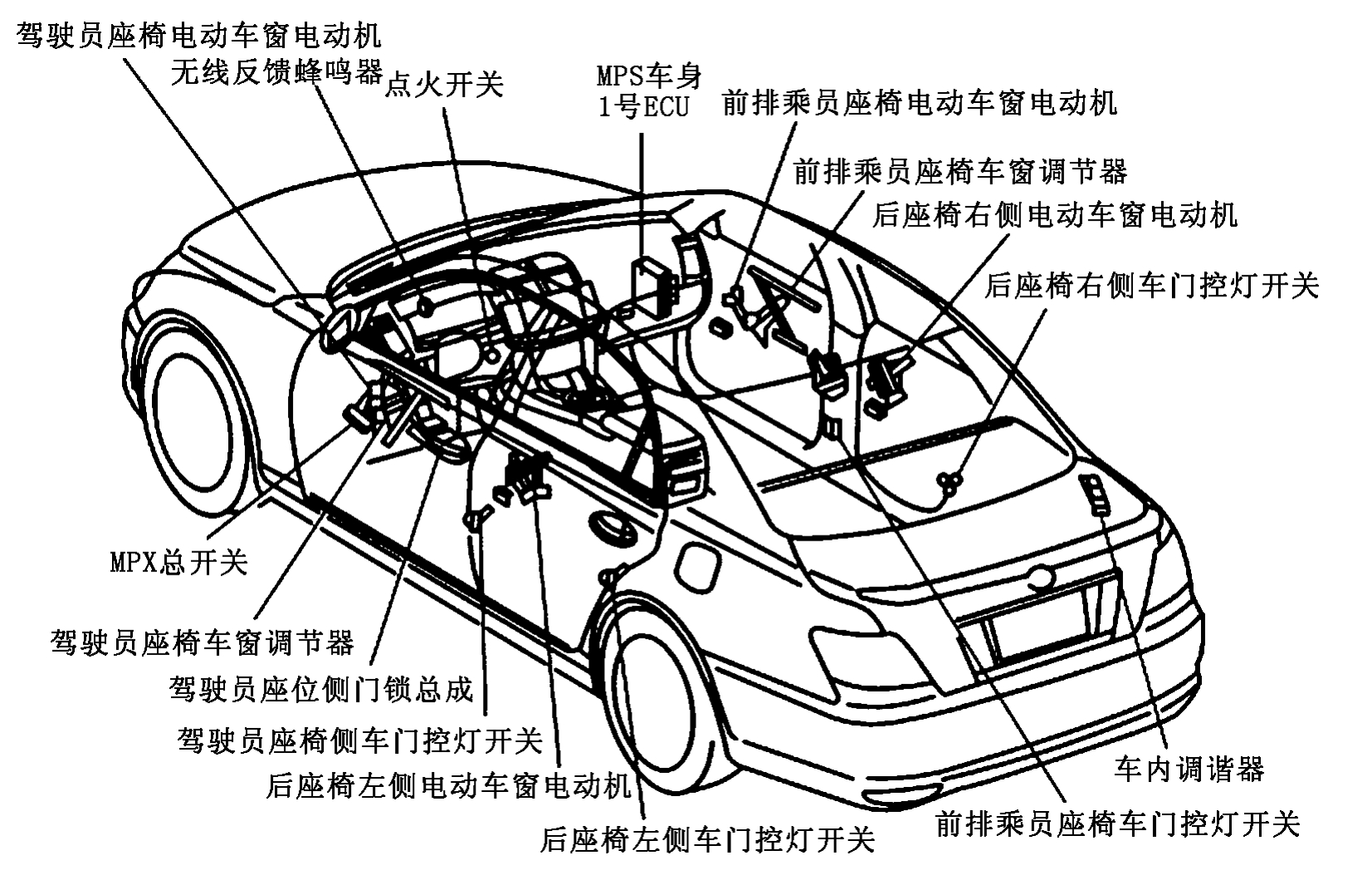
图9-8 电动车窗系统的组成部件
2.电动车窗系统的电路控制
电动车窗系统的电路控制图见图9-9。
MPX后座左侧、后座右侧车门玻璃开关的内部电路和MPX前排乘员座位车门玻璃开关的内部电路一样。
(1)防夹功能:在手动上升或自动上升过程中,如果玻璃夹住了异物,车门玻璃会自动下降50mm或者停留1s。万一防夹功能的误操作使车门玻璃不能完全关闭,通过对该车门玻璃开关持续10s的自动上升操作,能够取消防夹功能的操作。
(2)手动上升与下降功能:打开点火开关,将驾驶员座椅车门玻璃开关或者各个座椅车门玻璃开关置于上升,通过内部的CPU向手动上升一方输入ON,就可以使上升继电器置于ON,这时下降继电器会形成接地电路,电流流经BDR端子→上升继电器→DUP端子→电动车窗电机→DDN端子→下降继电器→接地,各座椅车窗电动机便会转向各自的上方。如果CPU检测出开关状态为OFF,就将这里的上升继电器置于OFF,停止电动车窗电动机的工作。手动下降功能电路分析和上升功能类似。
(3)通过MPX总开关进行自动操作:打开点火开关,通过对各座椅车门玻璃开关进行上升(或下降)操作,内置的CPU输入上升开关ON以及自动开关ON,通过双向车身多路通信系统,将其作为该开关的遥控上升(或下降)信号发送到MPX车身1号ECU。
MPX车身1号ECU把“遥控自动上升(或下降)”信号传送到各座椅车门玻璃开关,通过各座椅车门玻璃开关,将电动车窗电动机转动到全闭(或全开)位置。
(4)与发射器联动的车门玻璃上升和下降功能:MPX总开关通过双向车身多路通信系统,接收从驾驶员座椅接线盒ECU发出的无线电动车窗上升(或下降)工作指示信号,把内置的上升继电器(或下降继电器)设置为ON,通过双向车身多路通信系统将各座椅车门无线电动车窗上升(或下降)操作指示信号发送到MPX车身1号ECU中,使驾驶员座椅电动车窗上升(或下降)。
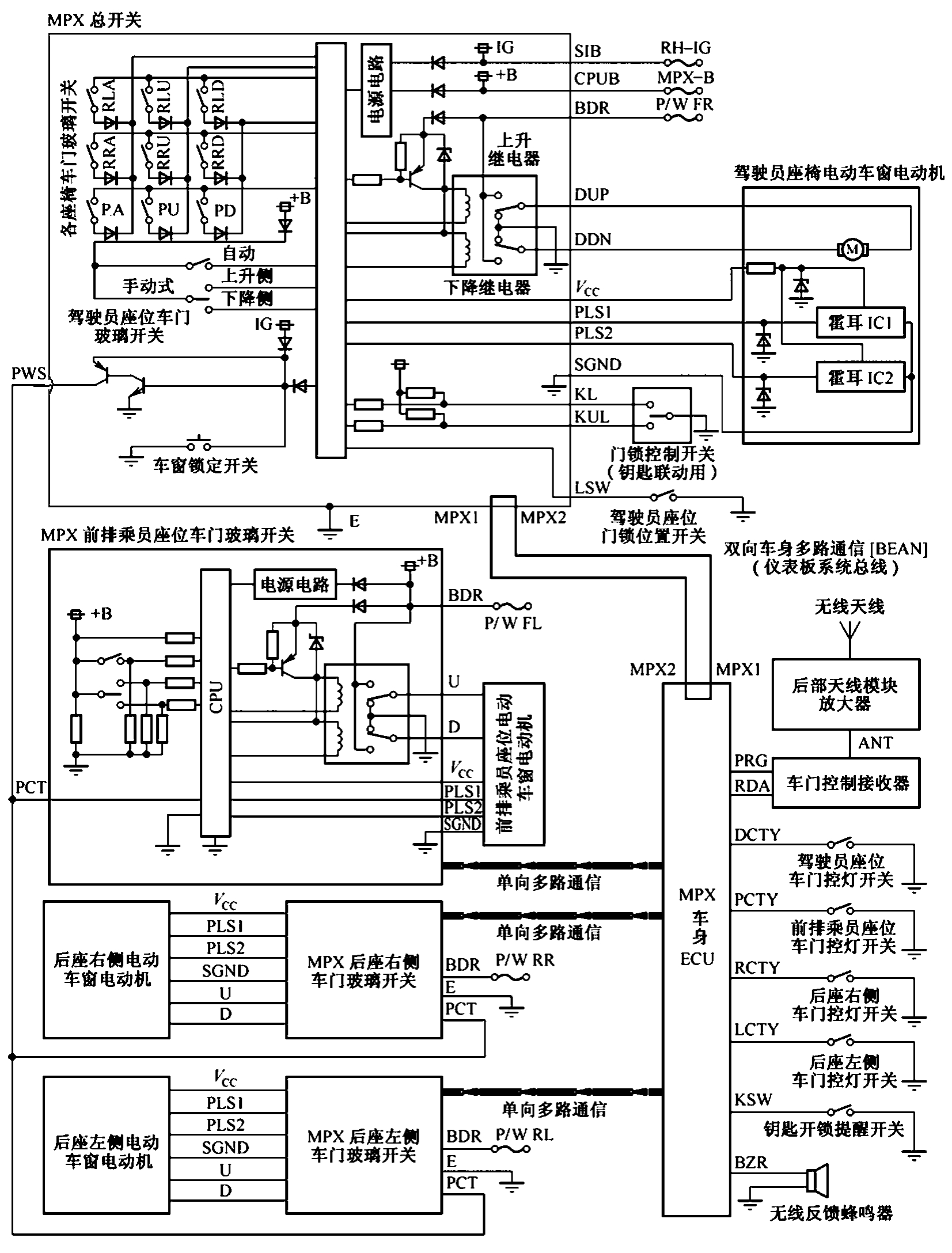
图9-9 电动车窗系统的电路控制图
如果MPX车身1号ECU接收了前排乘员、后排左侧车门、后排右侧车门的无线电动车窗上升(或下降)操作信号,就能把这些信号作为单向多路通信系统的数据,发送各座椅车门玻璃开关。和手动操作一样,使各座椅电动车窗玻璃上升(或下降)。
(5)驾驶员侧电动机车窗玻璃动作工作过程:驾驶员通过驾驶员车门玻璃开关动作使自动挡(或者上升、下降挡)对应的控制线有12V电压,内部CPU接收到信号后驱动上升(或者下降)继电器动作,使驾驶员侧玻璃电机动作,达到玻璃自动上升、上升或下降的动作。
(6)驾驶员控制副驾驶员电动机车窗玻璃动作工作过程:驾驶员通过驾驶员车门玻璃开关动作使自动挡(或者上升、下降挡)对应的控制线有不同的波形输入到CPU内进行分析处理,把处理的数据通过MPX网络信号线送到MPX车身ECU,其内部CPU接收到信号后把信号通过单向多路通信系统线去副驾驶员电控单元,驱动上升(或者下降)继电器动作,使副驾驶员侧玻璃电机动作,达到玻璃自动上升、上升或下降的动作。副驾驶员通过自己的控制开关12V电压也能够控制电动机动作,但受儿童锁的影响,儿童锁PCT有12V其开关才起作用,PCT无12V时,开关不能够操作电动机动作,只有驾驶员侧的控制开关可以操作副驾驶员侧电动机动作。
(7)后左(后右)电动机车窗玻璃动作工作过程:控制方式与副驾驶员相同。
9.2.5 CAN-Bus系统的检修方法
1.检修电控单元的功能故障
在检查CAN-Bus系统前,须保证所有与CAN-Bus系统相连的电控单元无功能故障。功能故障是指不会直接影响网络传输系统,但会影响某一系统的功能流程的故障。这种功能故障对网络传输系统仅有间接影响,主要影响需要该传感器信号的电控单元的通信。若存在功能故障,则应先排除该故障,记下该故障并消除所有电控单元的故障代码。排除所有功能故障后,如果电控单元之间的数据传输仍不正常,就应检查网络的数据总线。
2.检修CAN-Bus总线的故障
(1)两个电控单元组成的双线式CAN-Bus系统的检测。检测时,关闭电源开关,断开两个电控单元。检查数据总线是否短路、断路、线路绝缘屏蔽层破损或对正极/地短路。
(2)三个或更多电控单元组成的双线式CAN-Bus系统的检测。检测时,先读出电控单元内的故障码。如果电控单元1与电控单元2和电控单元3之间无通信,应关闭电源开关,断开与数据总线相连的电控单元,检查数据总线是否断路。如果总线无故障,则可判断电控单元1有故障。如果所有电控单元均不能发送和接收信号,则应关闭电源开关,断开与数据总线相连的电控单元,检测数据总线是否短路、断路、线路绝缘屏蔽层破损或对正极/地短路。如果数据总线上查不出引起硬件损坏的原因,检查是否某一电控单元引起该故障。
(3)检测波形如图9-10、9-11、9-12所示。

图9-10 正常的数据波形

图9-11 CAN-H线和CAN-L线短接的数据波形

图9-12 数据线对地短路的数据波形
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










