



4.5.2 水下导航定位
下面以超短基线定位系统Gaps为例,简单说明水下导航定位作业的实施过程。
1.系统连接
GPS将定位数据传输给导航软件Hypack,Hypack将GGA格式的定位数据传输给Gaps控制盒ECB的GPS端口,控制盒ECB从MM I端口传输数据给导航机Gaps控制软件。控制盒ECB从Output端口传输信标的GGA数据给导航机Hypack作为设备Beacon。
系统连接和数据链如图4-20所示。
2.系统设置
进入Gaps软件界面,设置:
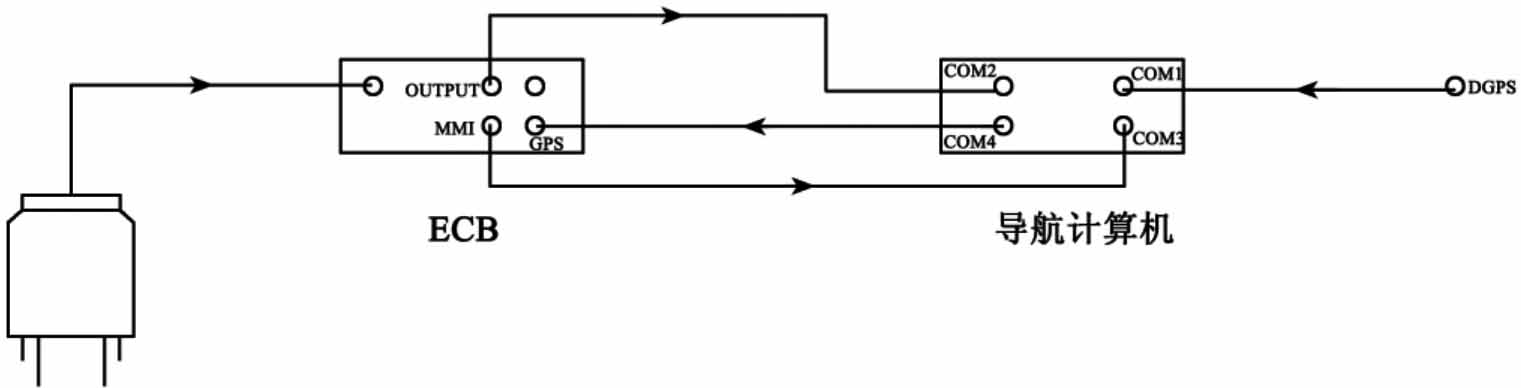
图4-20 Gaps定位系统连接
(1)换能器安装位置和入水深度;
(2)调入声速文件,必须保证每米深度下有声速数据;
(3)设置ECB各个端口数据格式波特率,一般仅设置GPS端口和output端口为GGA格式,9600 Baud/s;
(4)添加Beacon型号MT8,MFSK code 22;
(5)Blanking Time为1800ms;
(6)Turn Around Time(TAT) 90ms;IIF 19500Hz;选择Transponder。将serial Id(序列号)改为040,并选中“In use”单选项即可。
3.系统使用
系统的操作过程如下:
(1)Gaps要求船体周围环境噪声小于65dB,海况3~5级,因此,支撑船航速要低,一般为4节左右;
(2)打开GPS,进入Hypack导航界面,向ECB传送GGA数据;
(3)打开Gaps电源开关10秒后,启动Gaps软件界面;
(4)等待Gaps右侧各个指示灯均变绿,且无错误指示后点击“START”(一般需要5~10分钟,屏幕上可看到换能器姿态及经纬度,检查有无错误);
(5)打开信标开关,旋至L0(开关位置以·为准)即F1位置;
(6)将信标置入水中,Gaps跟踪到目标后,MT8的各项数据会依次显示,Hypack中会出现拖体图标;
(7)测量完毕后,将信标开关关闭,在Gaps跟踪软件中点击“STOP”停止键,水下定位数据采集工作结束。
4.导航定位实验
实验目的为主要测试当换能器和应答器同处于运动状态时,Gaps超短基线系统水下导航定位的性能和精度。
实验条件如下:
(1)校准误差
IXSea Gaps超短基线内置高精度光纤罗经,无论Gaps换能器姿态如何,高速率输出的方位、姿态等数据均可以帮助Gaps系统计算出水下目标的准确位置。经室内实验证明,可以免校准。
(2)GPS定位误差
实验中使用RTK GPS进行水上定位,为测量船以及船上Gaps换能器提供平面位置,平面位置精度达到厘米级。
(3)声速误差
在测量开始前,进行声速剖面的测量。若最大最小声速值之差小于1m/s,可以不用考虑声线弯曲的影响。
(4)噪声误差
船行进时的螺旋桨噪声和换能器、应答器在水中行进造成的水动力噪声,是拖航定位实验的主要噪声源,也是定位误差的重要影响因素。
实验采用三条测量船,其中一条船将1个应答器竖直固定安装,使用GPS RTK精确测量其位置。另一个应答器拖于水中,测量船以4节速度在既定测线上往返运动。在另一条测量船上固定且竖直安装换能器,也以4节速度在距另一测量船约20m的平行测线上往返运动。实验历时1h。
由于系统采用相对定位,以锚定船上的应答器为参考,则可以确定另外两条船上的应答器和换能器的运动轨迹(如图4-21所示)。
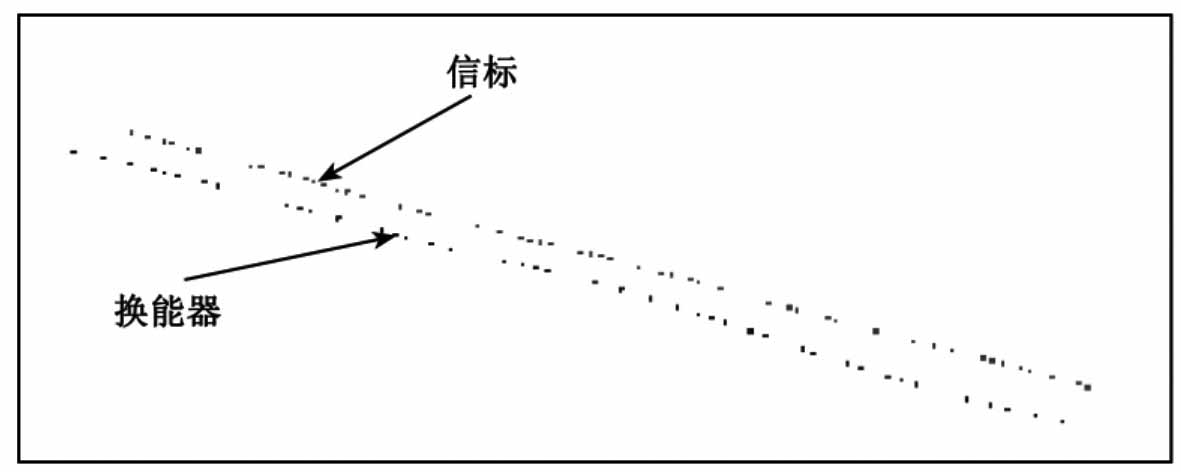
图4-21 导航实验中应答器和换能器的实测航迹
根据前述原理,编写程序对超短基线定位数据进行卡尔曼滤波。
如图4-22所示,原始观测数据是带有随机误差的数据,并且有些数据还带有较大误差,即所谓的异常观测值。
图4-23所示为经卡尔曼滤波后的数据,可以看到滤波后数据较原始数据更平滑,航迹显示符合实际。
图4-24所示为将滤波后的数据与原始数据进行比较,可以看出二者在正常导航定位情况下吻合。这说明卡尔曼滤波取得了良好的滤波效果,改善了超短基线水下的导航精度和可靠性。
上述导航实验结果表明,通过对原始导航数据进行卡尔曼滤波,Gaps系统具有较好的水下导航性能和较高的导航精度。
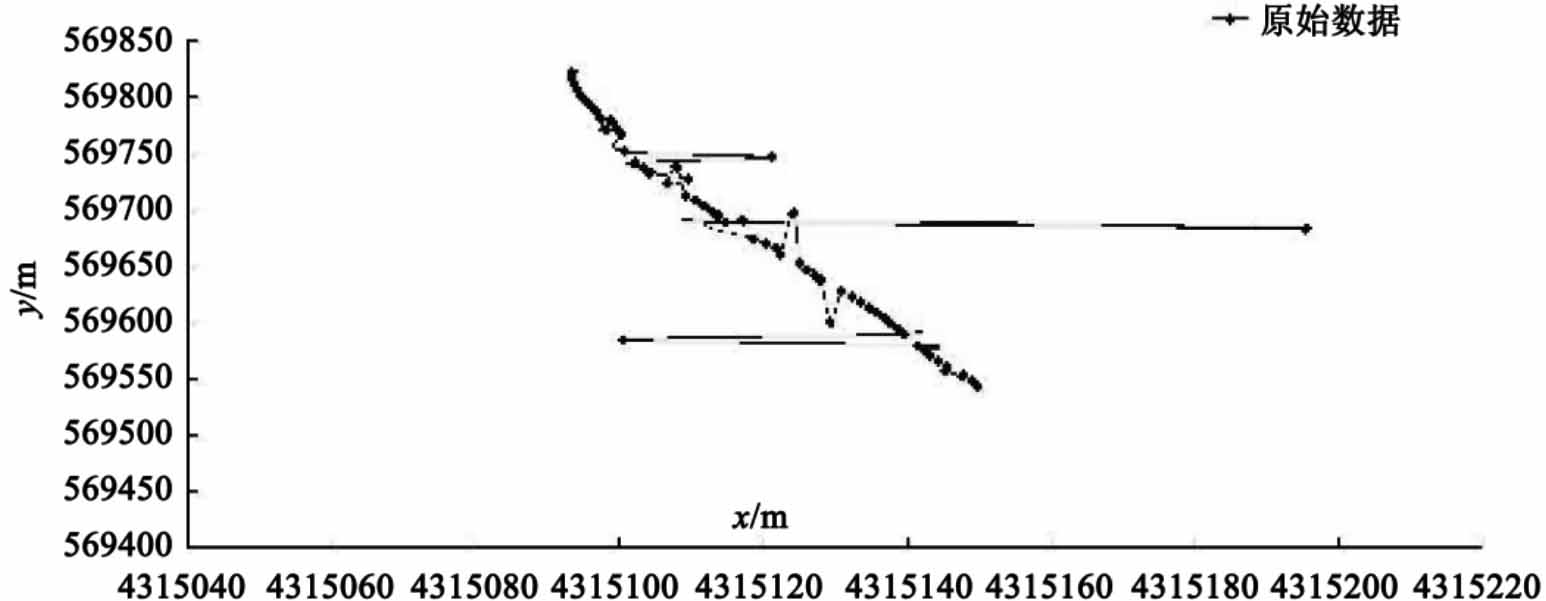
图4-22 原始观测数据
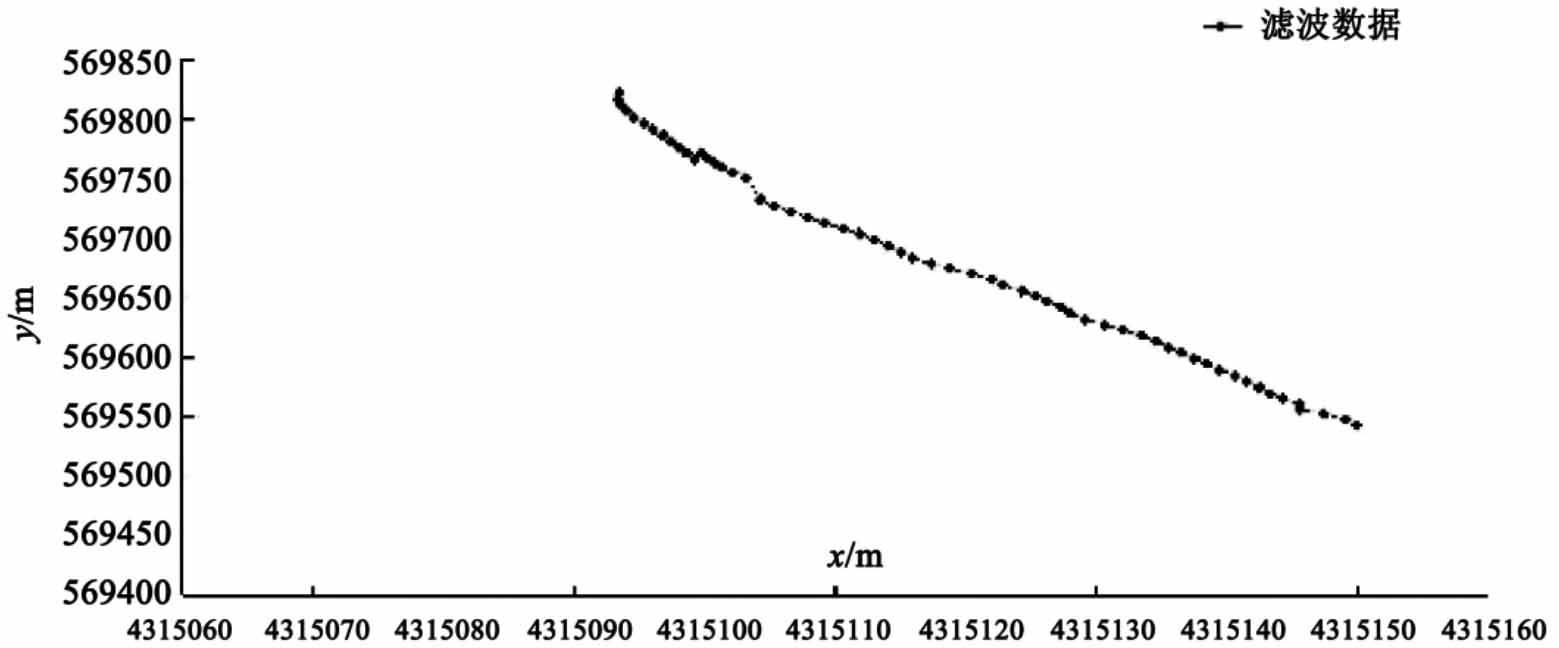
图4-23 滤波后的数据
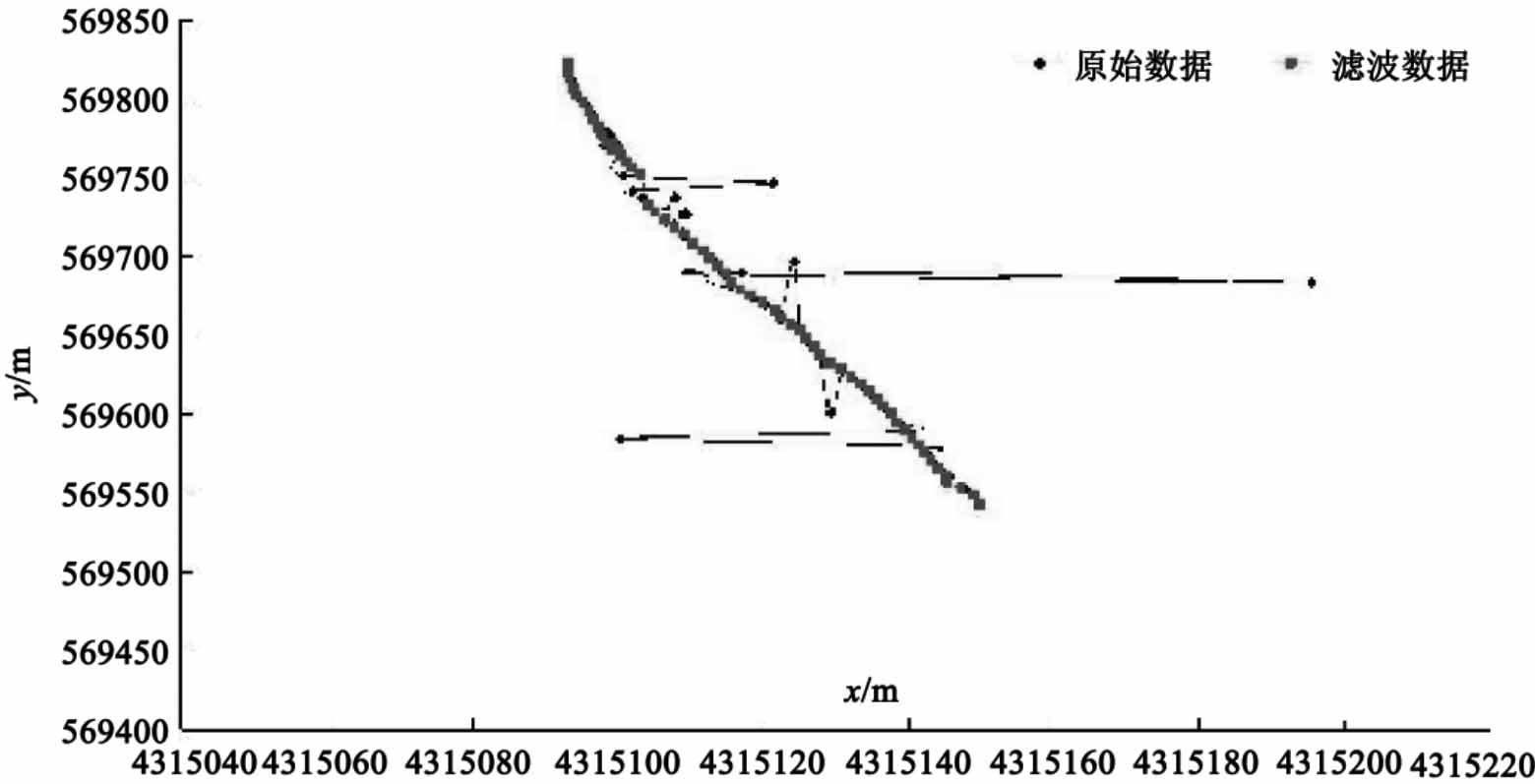
图4-24 原始数据与滤波数据
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。









