



投入产出表转移矩阵的数学调整法——拉格朗日未定系数法
龚飞鸿 杨树庄 李 杰
一、问题的提出与模型
产业层次生产率研究中,我们使用了生产者行为模型,它是生产的一般均衡模型,即静态投入产出表。为了测定产业部门生产率,必须具有时间序列的投入产出表。我们在生成1981~1987年系列投入产出表时,基于我国已调整且具有可比性的1981年、1983年和1987年的三张投入产出表,应用了日本庆应大学黑田教授在20世纪80年代首先提出的拉格朗日未定系数法。
自1962年斯通提出RAS法调整投入产出关系中的转移矩阵以来,数学方法的探索深入该解的存在性、唯一性和迭代的收敛性等问题。哥曼、毕金和巴恰切等的研究成果,在一定的约束条件下,回答了这些问题,但RAS法存在着固有的困扰,诸如超大矩阵约束条件的检验,以及原始矩阵和给定边际约束的微小变动引起迭代结果的不稳定性。日本黑田教授提出对非负矩阵及约束,在加权二次目标函数取极小时的估计方法,因为方法中引入拉格朗日未定乘数,故此法称为拉格朗日未定系数法。
![]()

在上述条件下,寻求估计转移矩阵(xij)(1,2,…,m,j=1,2,…,n)且满足约束:
![]()
以上提出的问题,它具有m+n个约束,有m×n个变量,除了m= n=2的特殊情形下,此问题有无数解(xij),不能确定唯一解。考虑到投入产出关系中,技术系数在短时间内具有相对稳定的特点,引入估计期与基期技术系数相对差平方和最小为目标函数,求(xij)的唯一解。
定义:cij=xoij/zoi,称基期转移矩阵的列系数;
ij=xoij/yoi,称基期转移矩阵的行系数。
则目标函数和约束条件为:
![]()
约束于:

![]()
由上述,我们可以认为估计xij,像一个目标函数和约束方程(5)和(7)的误差极小的问题。即:
![]()
式中λ(i=1,2,…,m)和δ(i=1,2,…,n-1)是拉格朗日乘数。则v(xij,λi,δj)存在的充分条件是:
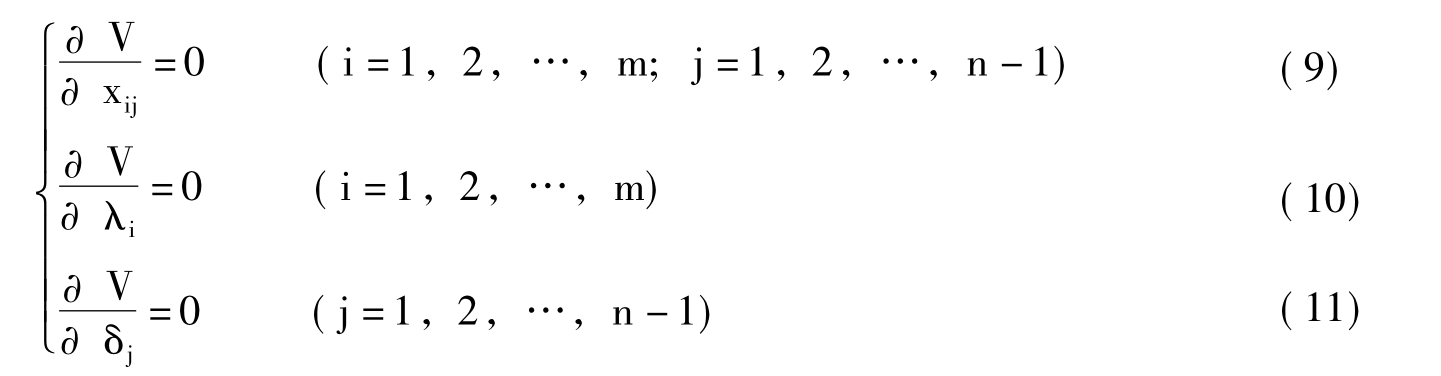
二、求解方法
由(9)得:
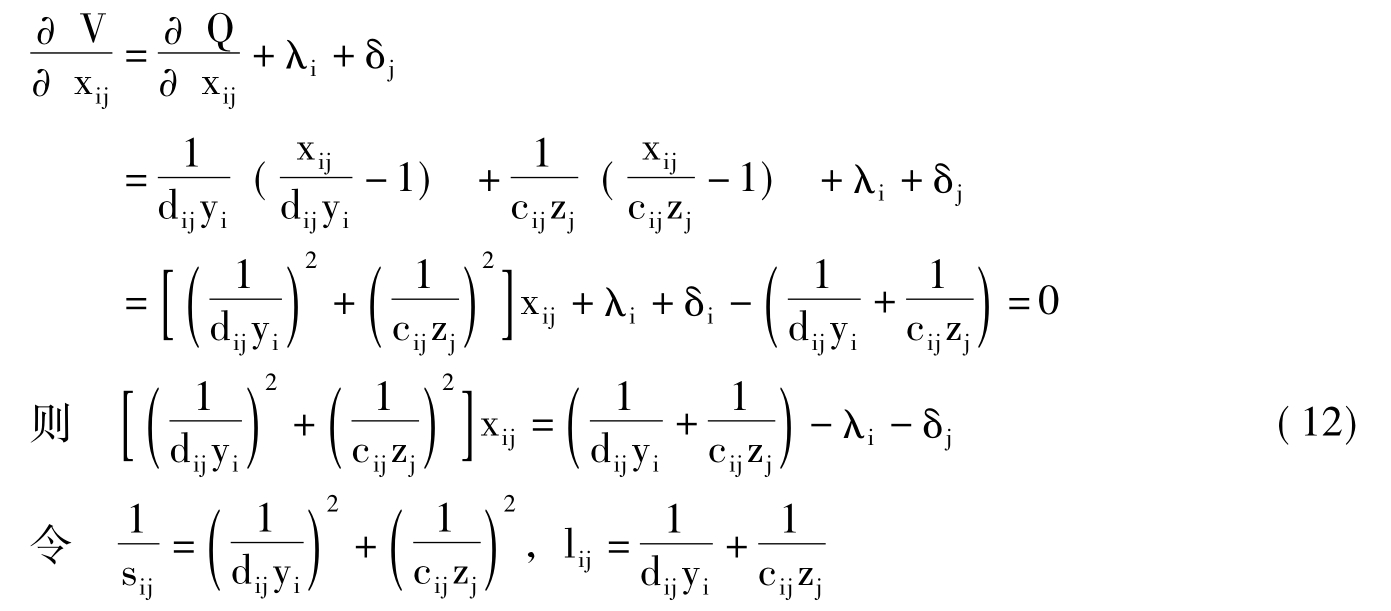
(12)式简写为
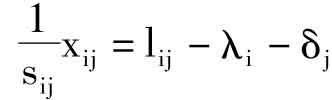
所以
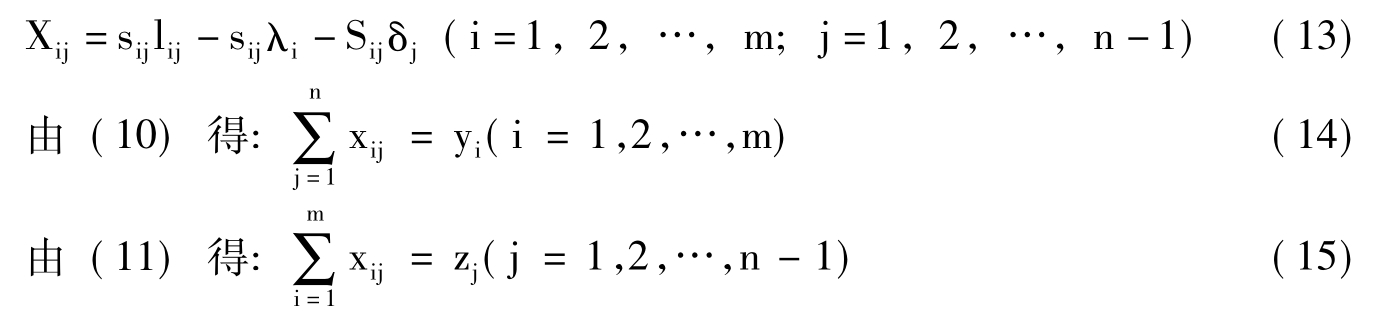
将(13)式分别代入(14)及(15)式得联立方程组:

它具有λ1,λ2,…,λm,δ1,δ2,…,δn-1等m+n-1个变量,并有m+n-1个,它的矩阵形式是:
从投入表转移矩阵的构成特性,在剔除了矩阵中全零元素的行(或列)以后,由它生成的方程组(18),每一个方程都是独立的,所以其系数矩阵是满秩,方程(18)有唯一解。故而(13)式被确定,xij(i=1,2,…,m;j=1,2,…,n-1)是唯一的。xij的最后一列元素xin是:
![]()
也是唯一的。当m和n很大时,可将(18)式矩阵分块为:
![]()
式中:
TS是S的转置矩阵。
将(20)写成联立方程是:
![]()
则其解为:
![]()
再代入(13)、(19)求出(xij)m×n。
三、案例
设基期基本流量矩阵为:
求解步骤如下:
1.先求出基期转移矩阵并yoi、zoi的(cij)和(dij),得:

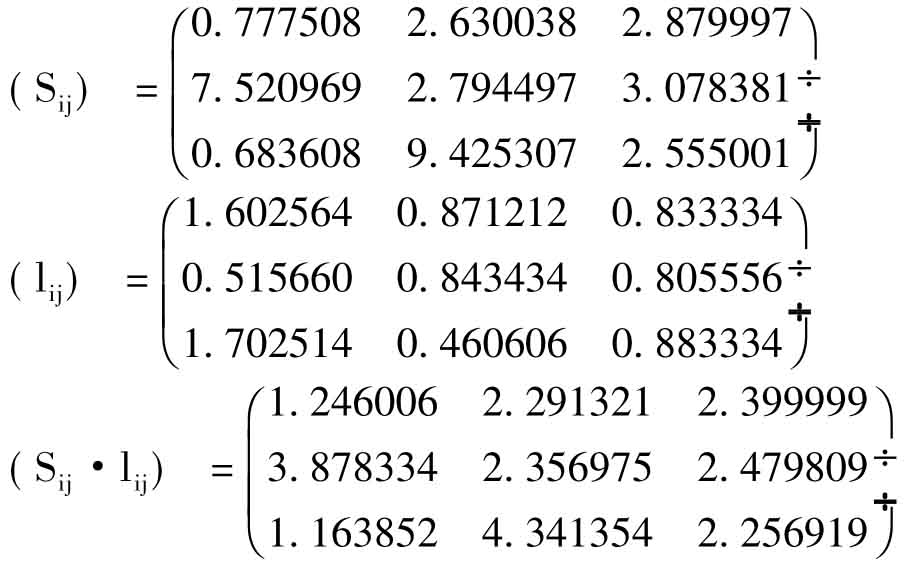
2.根据假设 求出(x),(l)ijij及Sijlij得:
求出(x),(l)ijij及Sijlij得:
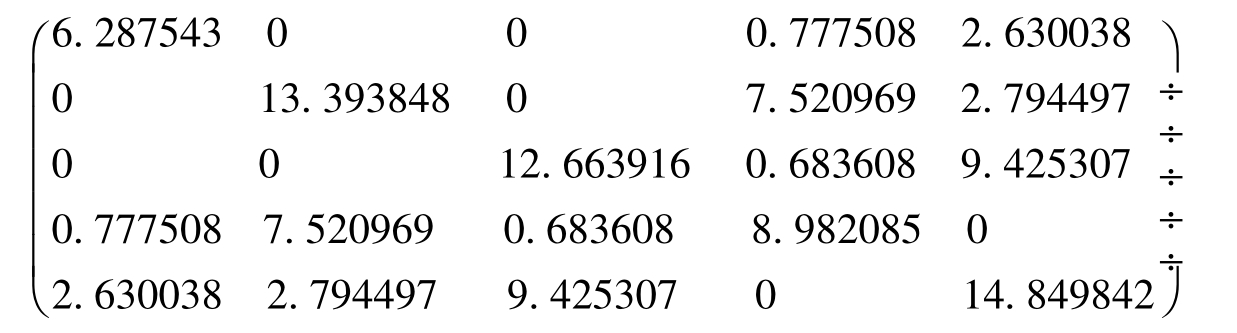
3.引入拉格朗日未定乘数后的方程组是:
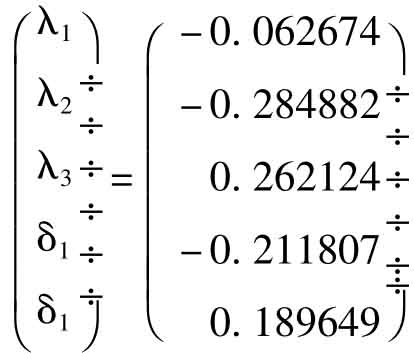
求解后得:

4.新的基本流量矩阵(Sij)

(原载李京文等著:《生产率与中美日经济增长研究》,中国社会科学出版社1993年版。这次做了压缩和微小改动)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











