



为了写出矢量形式的牛顿定律,我们只需要再走一步,接着定义加速度矢量就够了。这一步就是速度矢量的时间导数,容易证明它的分量是x,y和z对时间i的二阶导数

利用这个定义,牛顿定律就可以按这样的方式写出:

或者

于是,证明在坐标旋转下牛顿定律的不变性这个问题就是:证明a是一个矢量;我们刚刚做了这个证明。证明F是一个矢量:我们假设它是一个矢量。这样,如果力是一个矢量,那么,由于我们知道加速度是一个矢量,因此,方程(1.13)在任意坐标系下看起来都将一模一样。以一种不显含x,y和z的形式写下牛顿定律具有这样的好处,从今以后,每当我们要写下牛顿方程或者其他物理定律时,再也不需要写出三条定律了。表面上看,我们写下一条定律,但实际上对每一个特定的坐标系,自然就是三条定律,原因就是,任何矢量方程表示,方程两边各个分量相等。
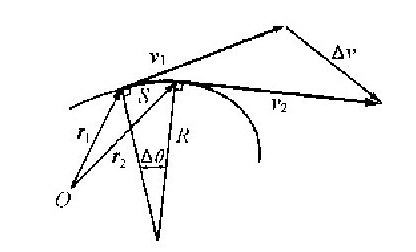
图1-7 一条弯曲的轨道
加速度是速度矢量的变化率,这个事实有助于我们在某些相当复杂的情况下计算加速度。比如说,假设一个粒子正在一条复杂的曲线上运动(图1-7),而且在某个特定的时刻i具有确定的速度ν1,而当到达另一个稍晚一点的时刻i2时,它具有不同的速度ν2。加速度是什么呢?答案是:加速度就是速度之差被这个小的时间间隔除,这样,我们就需要用到两个速度之差。我们如何得到速度之差呢?为了把两个矢量相减,我们过ν2和ν1的终点画出这个矢量;即,取△作为两个矢量之差,对吗?不对!只有当矢量的尾部放在同一点上时,上面的做法才行得通!如果我们把矢量移到别的某处再画一条直线过来,就毫无意义了,因此,务必要注意这一点!为了把矢量相减,我们必须画一个新的示意图。在图1-8中,ν1和ν2均被画成与图1-7中它们的对应部分平行而且相等,这样我们就能够讨论加速度了。加速度当然就是△ν/△i。有趣的是能够将速度之差分解成两个部分;我们可以把加速度看成具有两个分量,一个是与路径相切方向上的△ν‖,另一个是与路径成直角的△v⊥,如图1-8所示。与路径相切的加速度当然只是矢量长度的改变,即速率v的改变:
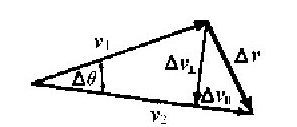
图1-8 计算加速度的示意图

利用图1-7和1-8计算加速度的另一个与曲线正交的分量是很容易的。在短时间△i内,设ν1和ν2之间的角度改变是一个小角△θ。如果速度的大小用v标记,那么,自然就有
△v⊥=v△θ
而加速度a就是
a⊥=v(△θ/△i)
现在我们需要知道△θ/△i的值,它可以按照以下方法求出:在某个确定的时刻,如果曲线近似于某个具有确定半径R的圆,那么,在时间△i内距离S自然就是v△i,其中v是速率。
△θ=v(△i/R),或者△θ/△i=v/R.
因此得到

与先前见过的一样。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










