




撰文 保罗·达里奥(Paolo Dario)阿里安娜·门西亚西(Arianna Menciassi)[1]
翻译 赵瑾
人体之旅不再只是幻想。微型机器人也许很快就能够进入人体,为病人诊断疾病、释放药物,甚至实施手术。
药物机器人
● 胶囊相机的出现,让人们有机会看到整个消化道内的样貌,但这些胶囊状机器人不能自主行动,用途和准确性都很有限。
●现在,研究人员正在研发仅有药丸大小、能自主行动的胶囊机器人,可用于检查、诊断和实施手术。
●使机器人组件微型化,以便在人体内执行特定的任务,这是工程学面临的新挑战。正是在这些挑战的激励下,科学家提出了开创性的解决方案,将对机器人和其他医学技术产生广泛影响。
电影《神奇旅程》(Fantastic Voyage)讲述了这样一个故事:为了挽救一位病人的生命,几名医生在身体缩小后,通过血管进入病人的大脑,进行了一次惊心动魄的修复手术。这部电影拍摄于1966年,当时纯粹是一部科幻作品。1987年,当好莱坞把这部电影重拍成名为《惊异大奇航》(Innerspace)的喜剧时,现实世界的工程师已经开始制造可以作为医生替身穿梭于病人胃肠道的“药丸机器人”原型了。2000年,病人开始吞服世上第一种商业化胶囊相机,也就是从那时开始,医生在这种“胶囊”的帮助下,看到了原本不借助外科手术就看不到的人体构造,比如小肠内壁的皱褶。
在《神奇旅程》中,目前仍属于科幻的一个情节是:微型胶囊相机可以自行驱动,向肿瘤靠拢,然后采集活检样本;检查小肠中的炎症,甚至能施放药物治疗小肠溃疡。然而近几年,研究人员取得了很大的进步,他们改造了一些基本元件,把胶囊相机变成了可以自主行动的微型机器人。改进后的原型机器人有腿、推进器、精密的成像镜头和无线制导系统,目前已在接受动物试验的检验。或许要不了多久,这些微型机器人就将进入临床试验阶段。现在,科学家正在测试它们还存在哪些局限。
变被动为主动
消化道是药物机器人的首个阵地。1999年,以色列基文影像公司(Given Imaging)推出了世界首款无线胶囊相机M2A,它和随后问世的几款机型确立了无线装置在胃肠道检查中的有效性。现在,这种技术已成为一项常规的医疗检查(即胶囊式内窥镜)。遗憾的是,这些胶囊相机是被动的,不能人为操控,容易错过发病部位,假阴性结果的比率非常高。对于诊断工具来说,这是一个致命缺陷。如果窥视人体内部的目的是为了检查疾病,或者是为了近距离观察可能出现问题的部位,医生最想做的就是控制相机的行动,让它检查疾病相关的区域。
要让被动的“胶囊”变为更为可靠的胃肠道检查设备,研究人员必须在现有机型上添加驱动元件(即驱动器,actuator),推动“胶囊”在人体内穿行,或作为工具操控人体组织。而要控制这些驱动装置,就得进行双向、高速的无线数据传输,以便传送图像和指令。实际上,这些药丸相机必须成为微型机器人,能对研究人员的指令迅速作出反应;所有这些组件还需要有充足的能量供应,才能完成它们在人体内可能要耗时12个小时之久的旅行。这一切都要塞进体积为2立方厘米 (大概一颗软糖大小)的胶囊中,以便病人能顺利吞咽下去。
M2A问世的同年,韩国首尔的智能微系统中心(Intelligent Microsystem Center,IMC)启动了一项10年计划,着手研制具有先进功能的新一代胶囊式内窥镜。这类药丸机器人将具有内置传感器和一个成像用的光源,它能实施药物治疗,采集活检样本,还能在技术人员的无线遥控下移动。从2000年开始,其他公司和研究团体也陆续进军这一研究领域。来自欧洲的18个研究团队与IMC公司达成协议,共同研发用于癌症检查和治疗的胶囊机器人。这个项目名为VECTOR,是多能肿瘤识别与治疗性内窥镜胶囊(versatile endoscopic capsule for gastrointestinal tumor recognition and therapy)的缩写。我们在意大利比萨圣安娜高等学校(Scuola Superiore Sant’Anna)的研究小组负责该项目的科学与技术协调,而德国图宾根novineon公司的马克·O·舒尔(Marc O. Schurr)则为我们提供医学监督和指导。
这些高校和产业界的研究团队已抛出了很多颇具创新性的想法。确切地说,他们已经提出了多种方案来解决核心难题——如何控制胶囊机器人在人体内的行动。从本质上来说,这些方案大致分为两类。
第一类是用机载驱动装置来引导胶囊机器人的运动。这些装置可以是桨叶、腿、推进器或其他类似元件,它们整合在机器人的外壳上,一旦进入消化道,就能立刻发挥作用。由微型马达提供动力的驱动装置是最常用的胶囊运动引导设备,但在某些设计中 ,胶囊的“腿”还有另外一个功能——推开周围的组织,以便更好地观察某些区域,或者帮助胶囊通过肠道的收缩部分。不过,相对于可吞咽胶囊的总体积来说,马达和驱动装置(如齿轮)实在不小,再在胶囊上集成成像传感器和活检工具之类的医用模块等其他必要设备就成了一个难题。此外,要撑开人体组织,胶囊必须要有相当于自身重量10倍或20倍的强大力量,这就要求马达具有高扭矩(torque),能量消耗也相当大(功率约为0.5瓦)。高能耗对电池技术提出了高要求,因为电池的续航能力决定了胶囊机器人能运行多久。
为了节省电池能量,最好的折中办法或许是驱动装置只用来推进胶囊,撑开组织的任务用其他方式完成。例如,让病人在吞咽胶囊前饮用半升清水,这样一来,就可以在液体完全流入肠道前,使胃部扩张20分钟之久。在这段时间内,药丸相机就可以通过无线控制在胃中通行无阻,检查胃壁。
由于机载驱动器在体积和能耗方面存在局限性,一些研究人员开始关注另一类操控方法:在人体外施加磁场遥控胶囊在体内的运动。2005年,奥林巴斯和西门子公司推出了一种磁导系统,能使他们公司生产的被动胶囊相机转动。按照西门子公司的产品说明书,螺旋形移动会产生轻微摩擦,有助于胶囊钻过狭窄的消化道,比如小肠。
利用磁力来引导胶囊式内窥镜穿过肠道看似简单直接,但仅用磁力很难完全掌控胶囊的移动。磁场会随作用距离的增加而减弱,而且肠道结构并不规则,会使磁场强度发生突然改变,导致胶囊跳动,甚至完全切断胶囊受到的磁力控制。在实际操作中,这种不稳定性可能让操控者与胶囊相机失去联系,再也找不到它们在人体内的位置。增加磁场的强度或许可以弥补这种不足,产生更好更稳定的控制效果,但这或许需要对电磁线圈进行非常复杂的调整。
组合机器人
不论是从体外还是体内来控制胶囊的移动,都存在一定的局限性,因此我们认为,把两种方法结合起来,才能找到一种完美的解决方案,既不会让病人感到不舒服,又能提供可靠诊断信息。外部的磁力控制足以把胶囊定位到肠道中的大致位置,腿一样的驱动装置则可以改变方位,让胶囊移动到更好的观察位置。
我们的研究小组已经设计出这样的混合胶囊,它有4条由马达驱动的腿,已在猪体内接受过测试(猪肠道的大小与人类相似)。在吞咽以及穿越消化道的大部分旅行期间,胶囊的腿都是收起来的。紧贴腹部的外部磁场发生器会引导胶囊前进。当胶囊到达肠道内肠壁的收缩部分,它就会伸出腿,撑开周围的组织,轻轻地穿过通道。
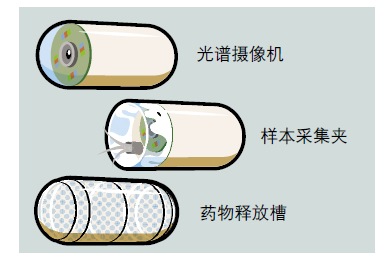
在大小肠的大部分区域,混合移动系统都能为医生提供全面目检所需的信息。由于不同的情况需要不同的解决方案,仅仅针对小肠,VECTOR计划就开发了3种胶囊:一种是用于普通检查的被动药丸相机;第二种是可以自主移动、进行光谱成像的诊断型胶囊,它能探测组织表面下的异常;第三种胶囊不仅具有同样的光谱传感设备,还携带了活检采样工具,它能采集组织样本并储存在胶囊中,胶囊离开病人身体后,医生可以从中取出样本。
既能进行活检,又能完成手术等更为复杂的医疗任务,这些能力将使胶囊式内窥镜机器人成为功能更加强大的医疗工具。但受到动力来源、体积偏小、扭矩不足等关键因素的限制,很多医疗任务都不是2立方厘米的“胶囊”所能完成的,因为完成这些任务需要进行复杂运动,必须具备多个驱动装置。
基于上述原因,我们正在研究一种先进的概念:能在人体内自行组装的手术机器人。我们来看看它是如何运作的。病人首先会饮用一种扩张胃部的液体,接着吞下10~15颗胶囊。每颗胶囊都是一个微型组件,两端具有磁性。一旦进入胃中,这些胶囊就会在医生的遥控下,迅速地组装成治病所需的机器人。然后,外科医生把组装好的机器人作为无线工具,在不须任何体外切口的情况下进行手术。手术完成后,医生可以破坏或重组胶囊之间的磁力连接,使这些组件通过消化道排出体外,不会对病人造成伤害。
我们利用2立方厘米的胶囊机器人,辅以可定制的、能用于人体内部的组件及驱动装置,已经制造出一种可自我组装的原型机器人。一个或多个胶囊装有相机,其他胶囊则携带着各类工具,所有胶囊都可以无线遥控。
微型机器人组件最终或许会有更广泛的应用,它们将因为各种医疗目的,出现在人体的各个部位。为胶囊式内窥镜研制的制导系统和成像传感器,现在也已经开始影响相关的医学技术,比如最新的传统内窥镜和腹腔镜手术工具。而在医疗领域之外,这些技术也是机器人微型化、无线化、多能化这种大趋势的一部分。胶囊机器人必将会对更多领域的机器人研制产生深刻影响。

[工作原理]
多功能微型机器人
为了制造可以在消化道中实施手术的微型机器人,科学家必须找到某种方法,无线操控它们的移动和精细动作。而且,他们还得将医疗工具、成像传感器以及动力来源全部装进一个足够小的胶囊中,以便病人能够顺利吞咽下去。以下列举了科学家想用微型机器人完成的一些任务,以及他们解决技术难题所用的方法。




扩展阅读
Wireless Capsule Endoscopy: From Diagnostic Devices to Multi purpose Robotic Systems. Andrea Moglia, Arianna Menciassi, Marc Oliver Schurr and Paolo Dario in Biomedical Microdevices, Vol. 9, No. 2, pages 235–243; December 12, 2006.
Wireless Therapeutic Endoscopic Capsule: In Vivo Experiment. P. Valdastri et al. in Endoscopy 2008, Vol. 40, No. 12, pages 979–982; December 2008.
Wireless Reconfigurable Modules for Robotic Endoluminal Surgery. Kanako Harada, Ekawahyu Susilo, Arianna Menciassi and Paolo Dario in Proceedings of the 2009 IEEE Inter national Conference on Robotics and Automation. Kobe, Japan, May 2009.
[1]保罗·达里奥和阿里安娜·门西亚西都是意大利比萨圣安娜高等学校的生物医学机器人学教授。20世纪90年代,达里奥发明了第一台自我驱动的结肠镜机器人,他还与韩国智能微系统中心及欧洲的机器人研究者合作,率先展开无线胶囊式内窥镜机器人的研究。达里奥与门西雅斯已经有10 年的合作史,他们主要从事微创治疗及医学纳米技术的微工程学(microengineering)研究。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










