



附件2 《国家重力控制测量规范》中的“数学模型”
重力测量各项计算的数学模型
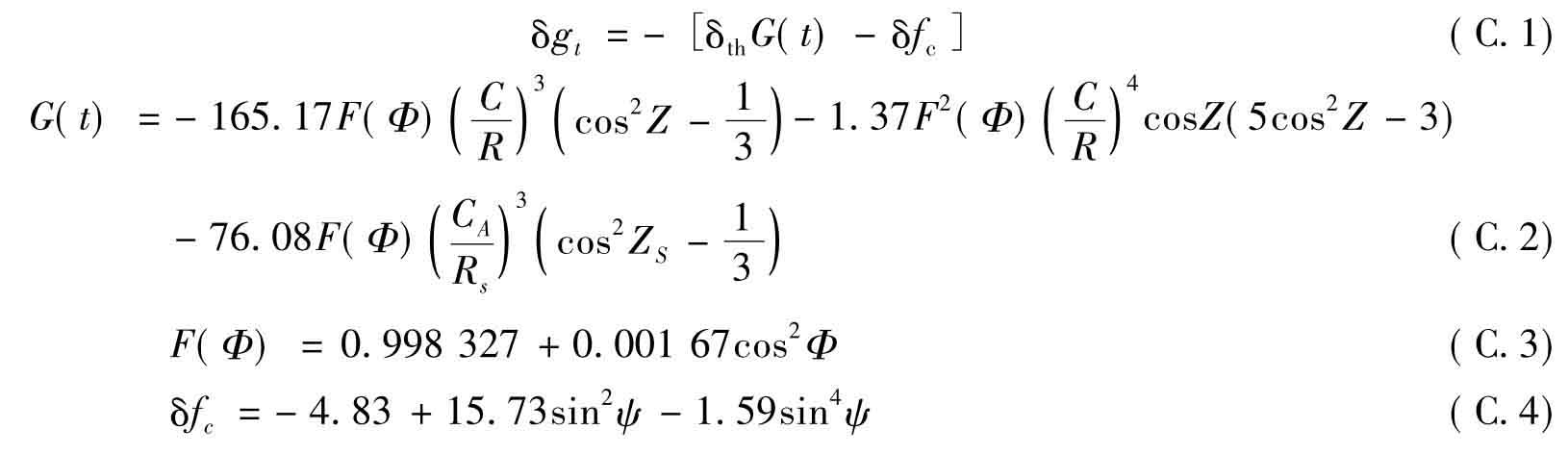
C.1固体潮改正
固体潮改正采用零潮汐系统,计算公式为:
式中:
δgt——固体潮改正值,单位为10-8m·s-2;
δth——重力潮汐因子;
δfc——永久性潮汐对重力的直接影响;
Φ——测站大地纬度;
ψ——测站地心纬度。
C.2气压改正
气压改正的计算公式

式中:
δga——气压改正值,单位为10-8m·s-2;
p——测点实测气压值,单位为hPa(百帕);
pn——测点标准气压值,单位为hPa(百帕);
H——海拔高程,单位为米(m)。
C.3极移改正
极移改正的计算公式
![]()
式中:
δgp——极移改正值,单位为10-8m·s-2;
ω——地球自转角速度,ω=7292115×10-11,单位为rad·s-1;
a——地球长半轴,a=6378136,单位为米(m);
λ、Φ——测点的地理经、纬度;
x、y——地极坐标,采用IERS公布的数值,单位为rad。
C.4仪器高改正
重力观测值改算为墩面值的计算公式为:
![]()
仪器高改正值δgh的计算公式为:
![]()
式中:
g0——墩面重力值,单位为10-8m·s-2;
gp——重力观测值,单位为10-8m·s-2;
θ——重力垂直梯度,单位为10-8s-2;
h——重力仪面板高度(绝对重力测量为落体下落初始位置高度),单位为米(m)。
C.5仪嚣读数的格值转换
转换公式为:
![]()
式中:
gR——格值表转换值,单位为10-5m·s-2;
R——仪器读数;
R1——仪器读数凑整至100格单位的整数值;
F1——仪器出厂格值表中R1相应的转换值,单位为10-5m·s-2;
F2——仪器出厂格值表中R1相应的间隔因子。
C.6重力仪零漂率
重力仪零漂率计算公式为:
![]()
式中:
k——零漂率;
g,g'——分别为测线起始点的往、返观测值,单位为10-8m·s-2;
t,t'——分别为测线起始点的往、返观测的相应时刻。
若测线未能当天闭合,测线中有i个静态观测点时,零漂率的计算公式为

式中:
gi,gt',ti,t'——分别为第i个静态观测点到达和离开时的观测值及相应的观测时刻。
C.7零漂改正
零漂改正的计算公式为:
![]()
式中:
δgk——零漂改正值,单位为10-8m·s-2;
Δt——测站点与起始点的观测时间差;
k——零漂率。
C.8相对联测段差
相对联测段差的计算公式为:
![]()
式中:
δgij——i、j两测点的重力观测段差,单位为10-8m·s-2;
gi,gj——分别为i、j两测点的观测值,单位为10-8m·s-2;
C——仪器的比例因子。
C.9相对联测精度估算
相对联测精度估算应包括:
a)测段的段差联测中误差m的计算,公式为:
![]()
式中:
v——各观测段差与观测段差平均值之差;
n——观测段差的个数。
b)环闭合差的计算,闭合差的计算公式为:
![]()
式中:
ω——环闭合差,单位为10-8m·s-2;
Δgi——第i个测段的最后观测段差,单位为10-8m·s-2;
n——闭合环中的测段数。
闭合差允许限差的计算公式为:
![]()
式中:
W0——闭合差允许限差,单位为10-8m·s-2;
m0——段差中误差的允许值,单位为10-8m·s-2。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










